23 luty 07 (124)

Para kinematyczna klasy 5 obrotowa - przegub walcowy
Jeżeli pominiemy tarcie, to kierunek reakcji przechodzi przez oś przegubu i jest do niej prostopadły. Nieznane są: kierunek reakcji oraz jej wartość (dwie niewiadome).
Zasady uwalniania od więzów przedstawiono na rysunkach 3.8a, b i c.
Poszczególne rysunki przedstawiają:
rysunek 3.8a - dwa człony k i / połączone przegubowo, pomiędzy którymi działa siła reakcji Rkt = -Rik',
rysunek 3.8b - dwa rozłączone człony oraz sposób przyłożenia sił reakcji Rfi = - R£, RY = - Rfc stosowany w analitycznej metodzie kinetostatyki; - są to składowe wektora Ru na kie
runkach równoległych do osi x i y układu współrzędnych;
rysunek 3.8c - dwa rozłączone człony oraz sposób przyłożenia sił reakcji, Rki =-Rlk, Ru =~R}k stosowany w grafoanalitycznej metodzie kinetostatyki; składowe reakcji są odpowiednio równoległe (R/k ) oraz prostopadłe (Rjk ) do członu k] oczywiście składowe Rkj i Rh nie mogą spełniać tego warunku w stosunku do członu /.
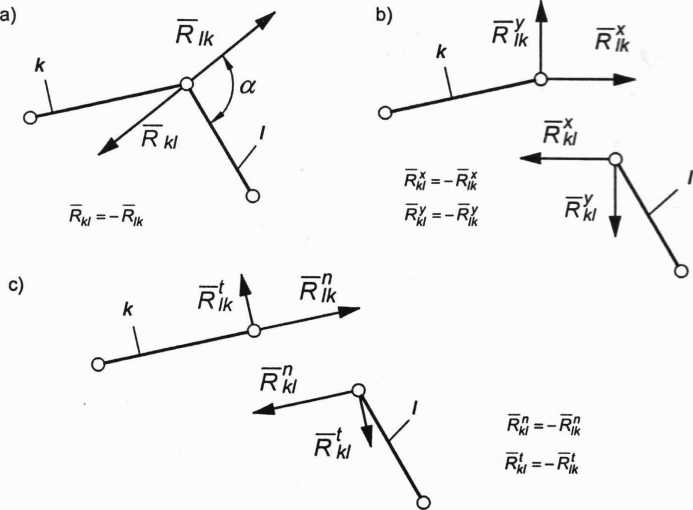
Rys. 3.8. Uwalnianie od więzów członów w parze kinematycznej obrotowej
123
Wyszukiwarka
Podobne podstrony:
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (38) 2. ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH2.1. CELI ZAKRESANALIZY KINEMATYCZNEJ ME
23 luty 07 (93) 2.3.2. Analiza kinematyczna przekładni kołowych Przekładnie kołowe są mechanizmami k
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (74) 71 a2.2.4. Metoda toru ocechowanego Metoda toru ocechowanego jest to metoda grafoana
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
więcej podobnych podstron