23 luty 07 (15)
1.1.4. Klasyfikacja par kinematycznych
Przez klasę pary kinematycznej „i" (i = 1, 2, ...,5) rozumiemy liczbę odebranych stopni swobody jednemu członowi przez współpracujący z nim drugi człon.
Klasę pary kinematycznej określamy z zależności
i = 6-s (1.2)
gdzie s - liczba pozostawionych stopni swobody
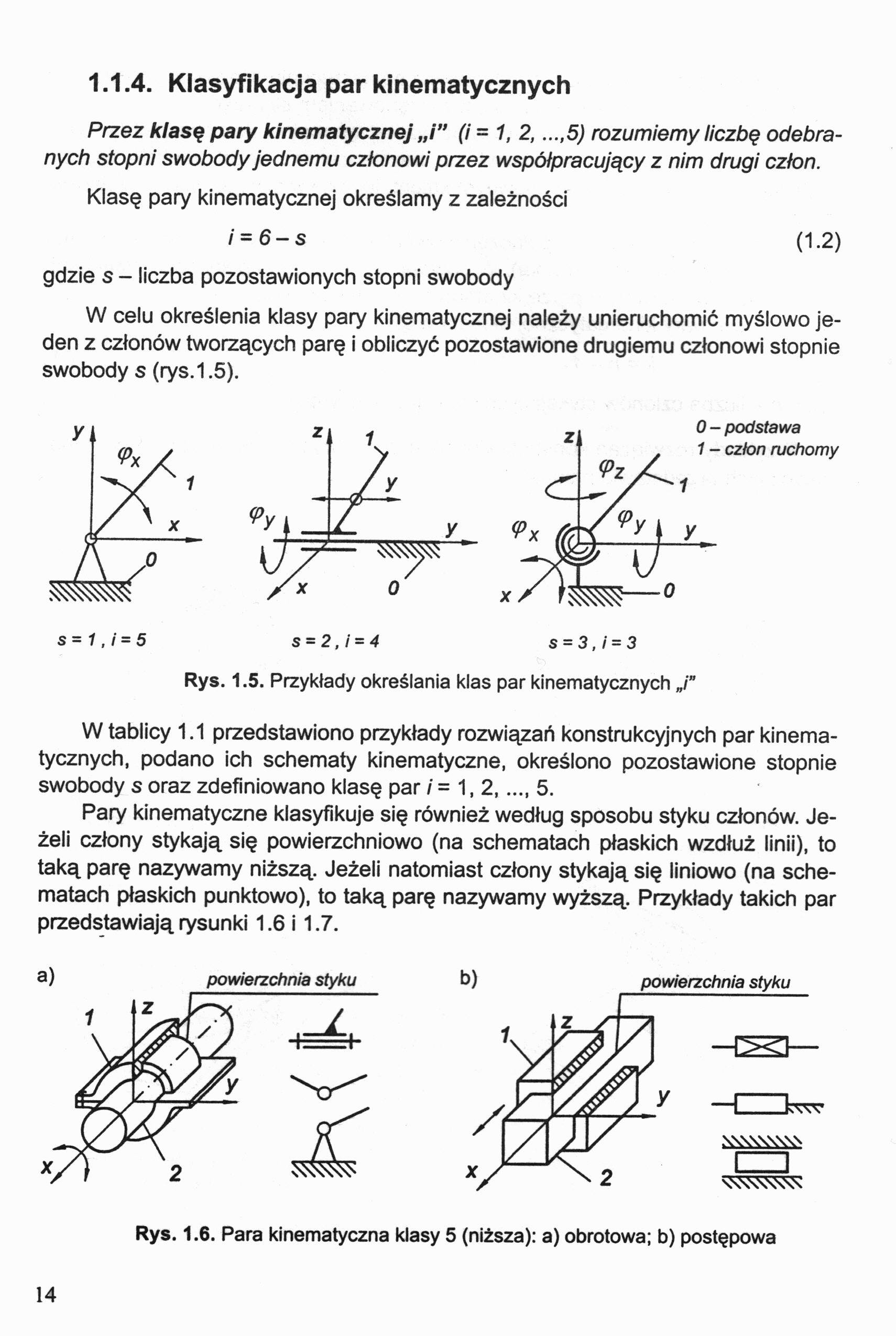
W celu określenia klasy pary kinematycznej należy unieruchomić myślowo jeden z członów tworzących parę i obliczyć pozostawione drugiemu członowi stopnie swobody s (rys. 1.5).
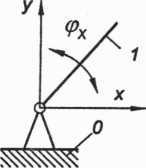
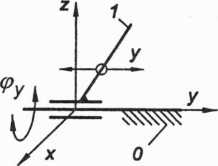
s = 1, i = 5 s = 2, i = 4 s = 3, i = 3
Rys. 1.5. Przykłady określania klas par kinematycznych „i”
W tablicy 1.1 przedstawiono przykłady rozwiązań konstrukcyjnych par kinematycznych, podano ich schematy kinematyczne, określono pozostawione stopnie swobody s oraz zdefiniowano klasę par #=1,2.....5.
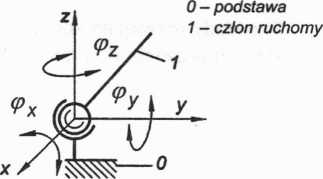
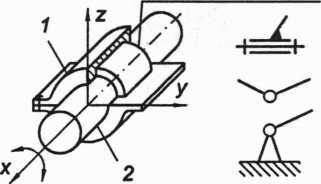
Pary kinematyczne klasyfikuje się również według sposobu styku członów. Jeżeli człony stykają się powierzchniowo (na schematach płaskich wzdłuż linii), to taką parę nazywamy niższą. Jeżeli natomiast człony stykają się liniowo (na schematach płaskich punktowo), to taką parę nazywamy wyższą. Przykłady takich par przedstawiają rysunki 1.6 i 1.7.
a) powierzchnia styku b) powierzchnia styku
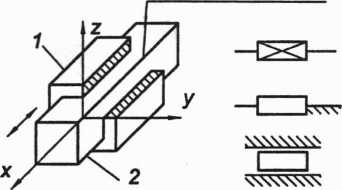
Rys. 1.6. Para kinematyczna klasy 5 (niższa): a) obrotowa; b) postępowa
14
Wyszukiwarka
Podobne podstrony:
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (26) 1.2. KLASYFIKACJA MECHANIZMÓW1.2.1. Zasady klasyfikacji strukturalnej mechanizmów pł
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (145) kierunków sił (Pri) i (W). Kierunek reakcji (R01) określa prosta przechodząca przez
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
więcej podobnych podstron