23 luty 07 (29)
1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
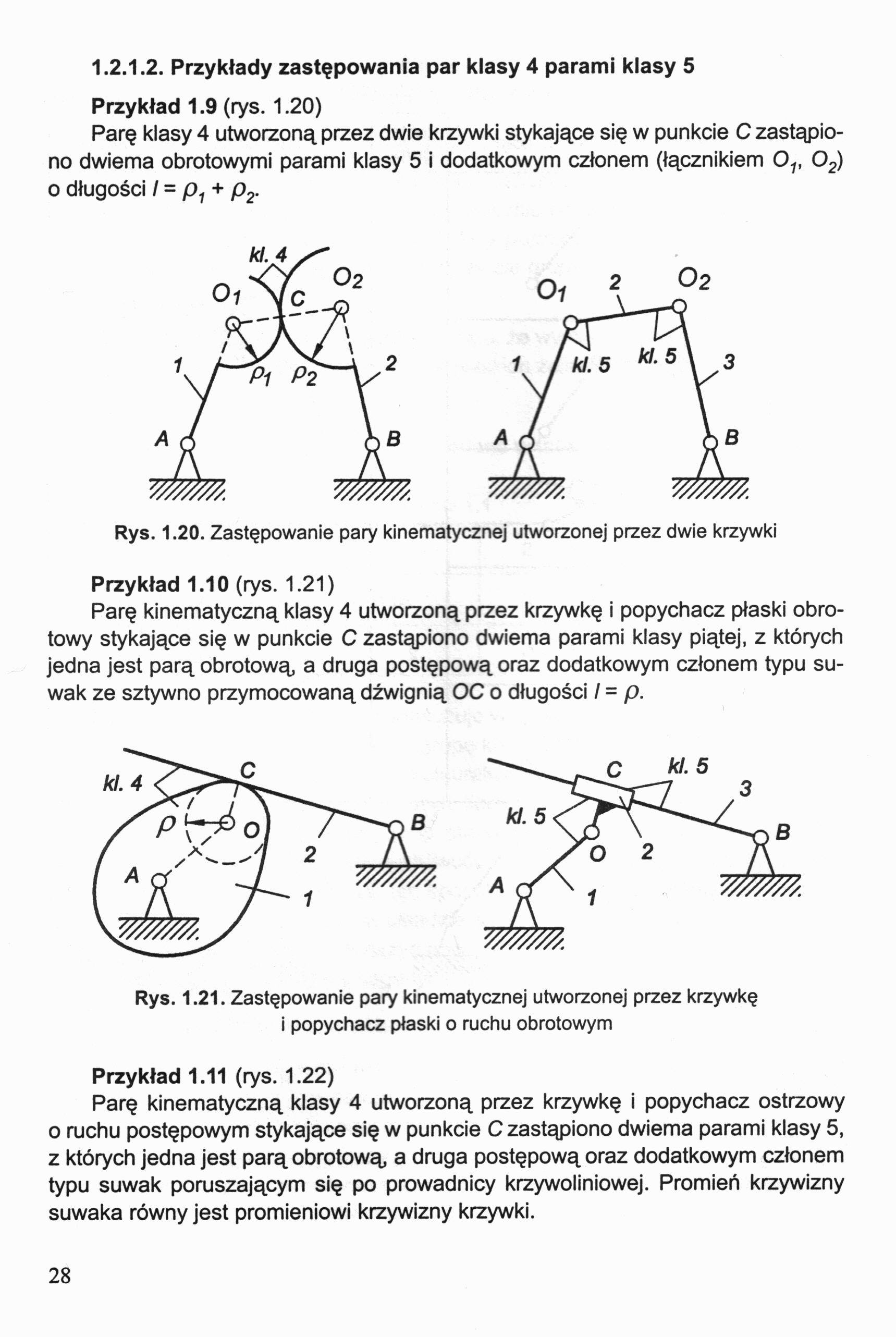
Parę klasy 4 utworzoną przez dwie krzywki stykające się w punkcie C zastąpiono dwiema obrotowymi parami klasy 5 i dodatkowym członem (łącznikiem Ov 02) o długości / = p, + p2.
Rys. 1.20. Zastępowanie pary kinematycznej utworzonej przez dwie krzywki Przykład 1.10 (rys. 1.21)
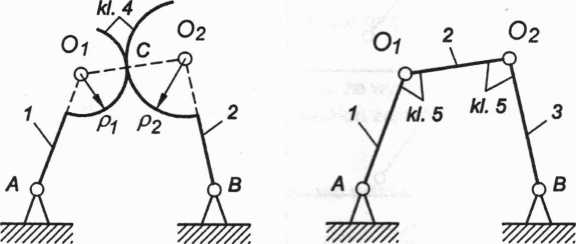
Parę kinematyczną klasy 4 utworzoną przez krzywkę i popychacz płaski obrotowy stykające się w punkcie C zastąpiono dwiema parami klasy piątej, z których jedna jest parą obrotową a druga postępową oraz dodatkowym członem typu suwak ze sztywno przymocowaną dźwignią OC o długości / = p.
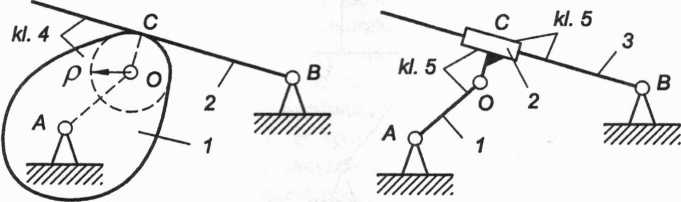
Rys. 1.21. Zastępowanie pary kinematycznej utworzonej przez krzywkę i popychacz płaski o ruchu obrotowym
Przykład 1.11 (rys. 1.22)
Parę kinematyczną klasy 4 utworzoną przez krzywkę i popychacz ostrzowy o ruchu postępowym stykające się w punkcie C zastąpiono dwiema parami klasy 5, z których jedna jest parą obrotową a druga postępową oraz dodatkowym członem typu suwak poruszającym się po prowadnicy krzywoliniowej. Promień krzywizny suwaka równy jest promieniowi krzywizny krzywki.
28
Wyszukiwarka
Podobne podstrony:
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
więcej podobnych podstron