23 luty 07 (123)
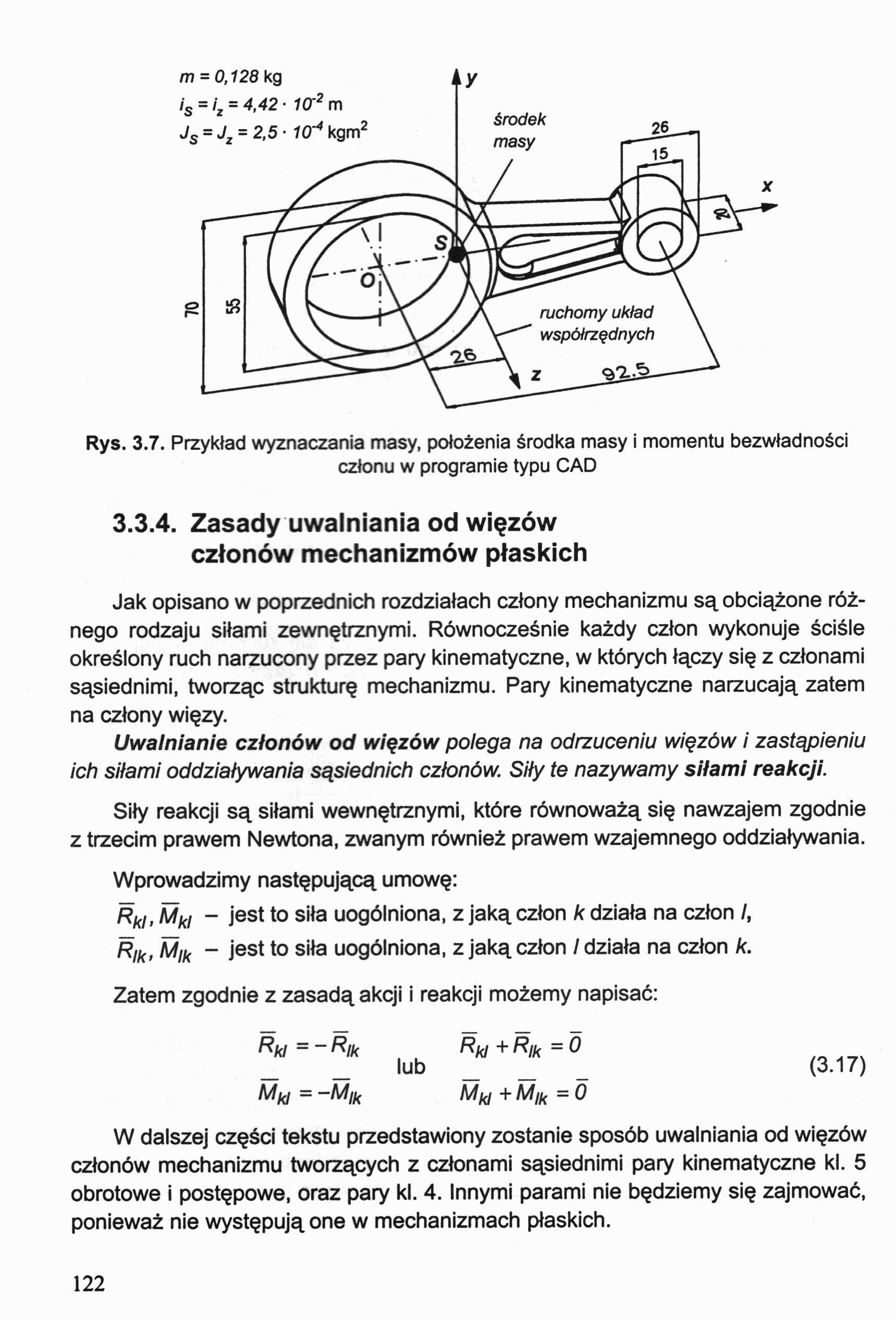
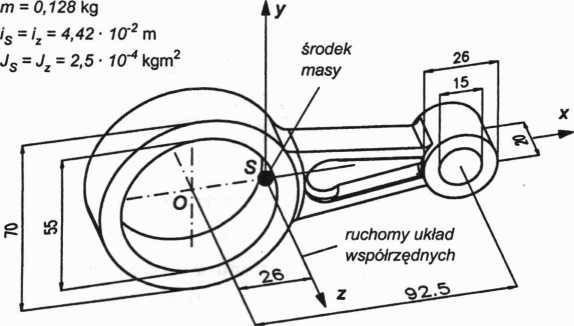
Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności
członu w programie typu CAD
3.3.4. Zasady uwalniania od więzów członów mechanizmów płaskich
Jak opisano w poprzednich rozdziałach człony mechanizmu są obciążone różnego rodzaju siłami zewnętrznymi. Równocześnie każdy człon wykonuje ściśle określony ruch narzucony przez pary kinematyczne, w których łączy się z członami sąsiednimi, tworząc strukturę mechanizmu. Pary kinematyczne narzucają zatem na człony więzy.
Uwalnianie członów od więzów polega na odrzuceniu więzów i zastąpieniu ich siłami oddziaływania sąsiednich członów. Siły te nazywamy silami reakcji.
Siły reakcji są siłami wewnętrznymi, które równoważą się nawzajem zgodnie z trzecim prawem Newtona, zwanym również prawem wzajemnego oddziaływania.
Wprowadzimy następującą umowę:
Rkh Mk/ - jest to siła uogólniona, z jaką człon k działa na człon /,
R,k, M/k - jest to siła uogólniona, z jaką człon / działa na człon k.
Zatem zgodnie z zasadą akcji i reakcji możemy napisać:
|
Rkl =~ Rlk |
Rkl +Rlk |
|
lub | |
|
Mkl = ~Mik |
Mkl +M/k =0 |
(3.17)
W dalszej części tekstu przedstawiony zostanie sposób uwalniania od więzów członów mechanizmu tworzących z członami sąsiednimi pary kinematyczne kl. 5 obrotowe i postępowe, oraz pary kl. 4. Innymi parami nie będziemy się zajmować, ponieważ nie występują one w mechanizmach płaskich.
122
Wyszukiwarka
Podobne podstrony:
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
więcej podobnych podstron