24 luty 07 (100)
Rozwiązanie
Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu Jzr1 oraz zredukowanego na wał silnika momentu sił Mzr1, równanie dynamiczne ruchu członu redukcji na podstawie (3.116) ma postać
Mzn=Ms-Mb=Jzr1^ (P3.176)
gdzie Mb = M2 ■\i2i[
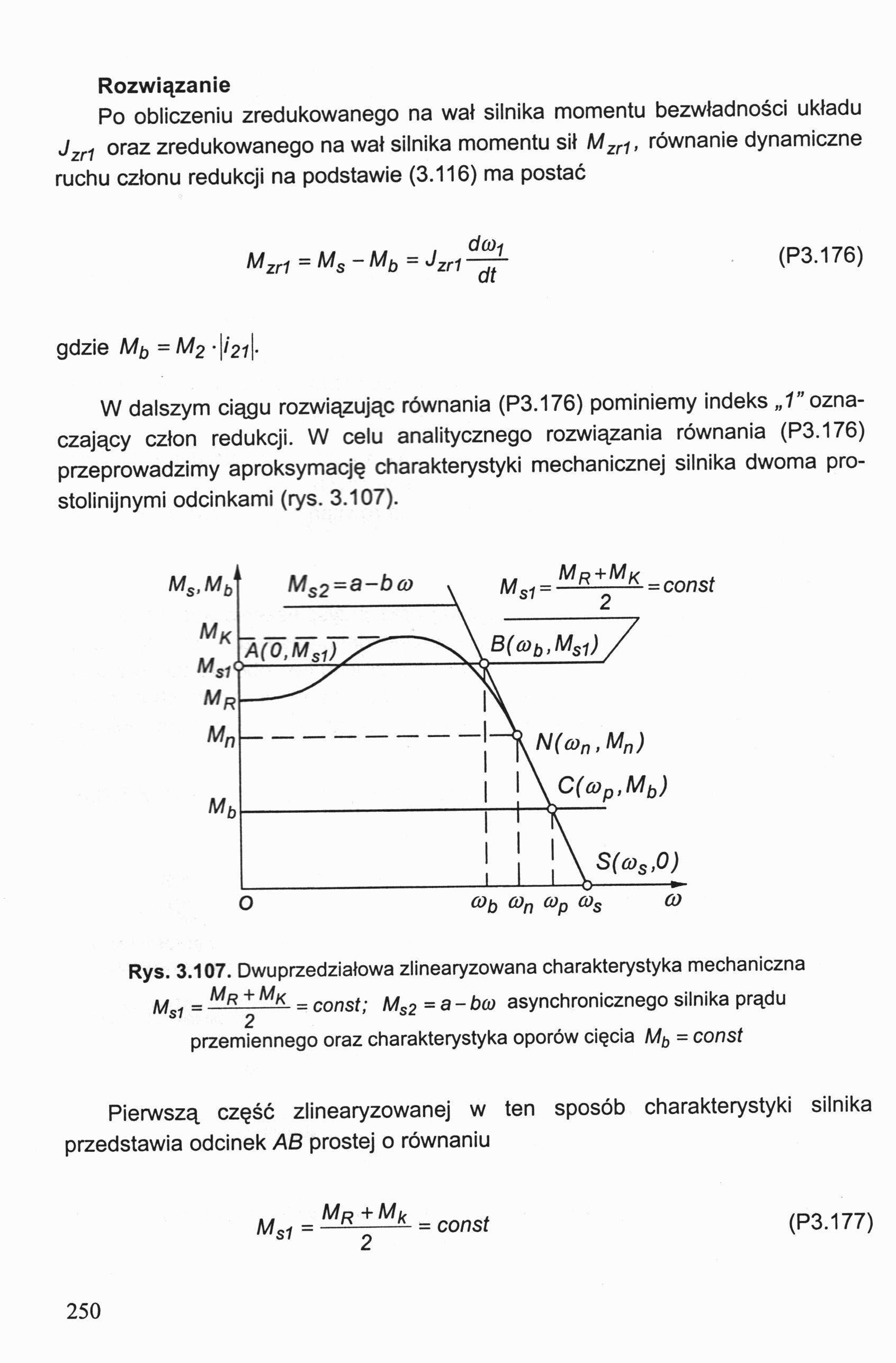
W dalszym ciągu rozwiązując równania (P3.176) pominiemy indeks „1" oznaczający człon redukcji. W celu analitycznego rozwiązania równania (P3.176) przeprowadzimy aproksymację charakterystyki mechanicznej silnika dwoma prostolinijnymi odcinkami (rys. 3.107).
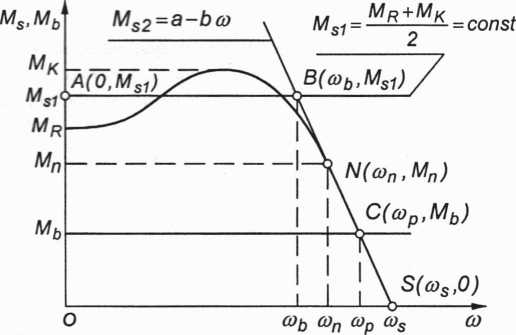
Rys. 3.107. Dwuprzedziałowa zlinearyzowana charakterystyka mechaniczna Ms1 = = const; Ms2 =a-bco asynchronicznego silnika prądu
przemiennego oraz charakterystyka oporów cięcia Mb = const
Pierwszą część zlinearyzowanej w ten sposób charakterystyki silnika przedstawia odcinek AB prostej o równaniu
M
s1
Mn + Ml,
= —2-- = const
(P3.177)
250
Wyszukiwarka
Podobne podstrony:
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (85) Przykład 3.26 Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 sił
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (127) Rozwiązanie W cyklu ruchu ustalonego praca sił czynnych jest równa pracy sił bierny
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (40) Rozwiązanie W pierwszym etapie rozwiązania przeprowadzamy analizę statyczną mechaniz
24 luty 07 (89) Rozwiązanie Rysunek 3.102a przedstawia model fizyczny układu napędowego, natomiast r
24 luty 07 (99) stąd po rozdzieleniu zmiennych (O > t jdco = — j[Mc(t)-Mb(t)]dt
24 luty 07 (136) Można wyróżnić cztery rodzaje teoretycznych charakterystyk silników.1)
24 luty 07 (144) Ad a) W zasadzie dąży się do stosowania silników wysokoobrotowych jako mniejszych i
24 luty 07 (157) 4.3. PROGRAM WORKING MODEL Program Working Model [19], dostępny obecnie w wersji 2D
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
24 luty 07 (2) c* ^ b) Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od wi
24 luty 07 (45) Sprawność chwilowa dla przyjętych na rysunku parametrów geometrycznych mechanizmu kr
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
więcej podobnych podstron