24 luty 07 (157)
4.3. PROGRAM WORKING MODEL
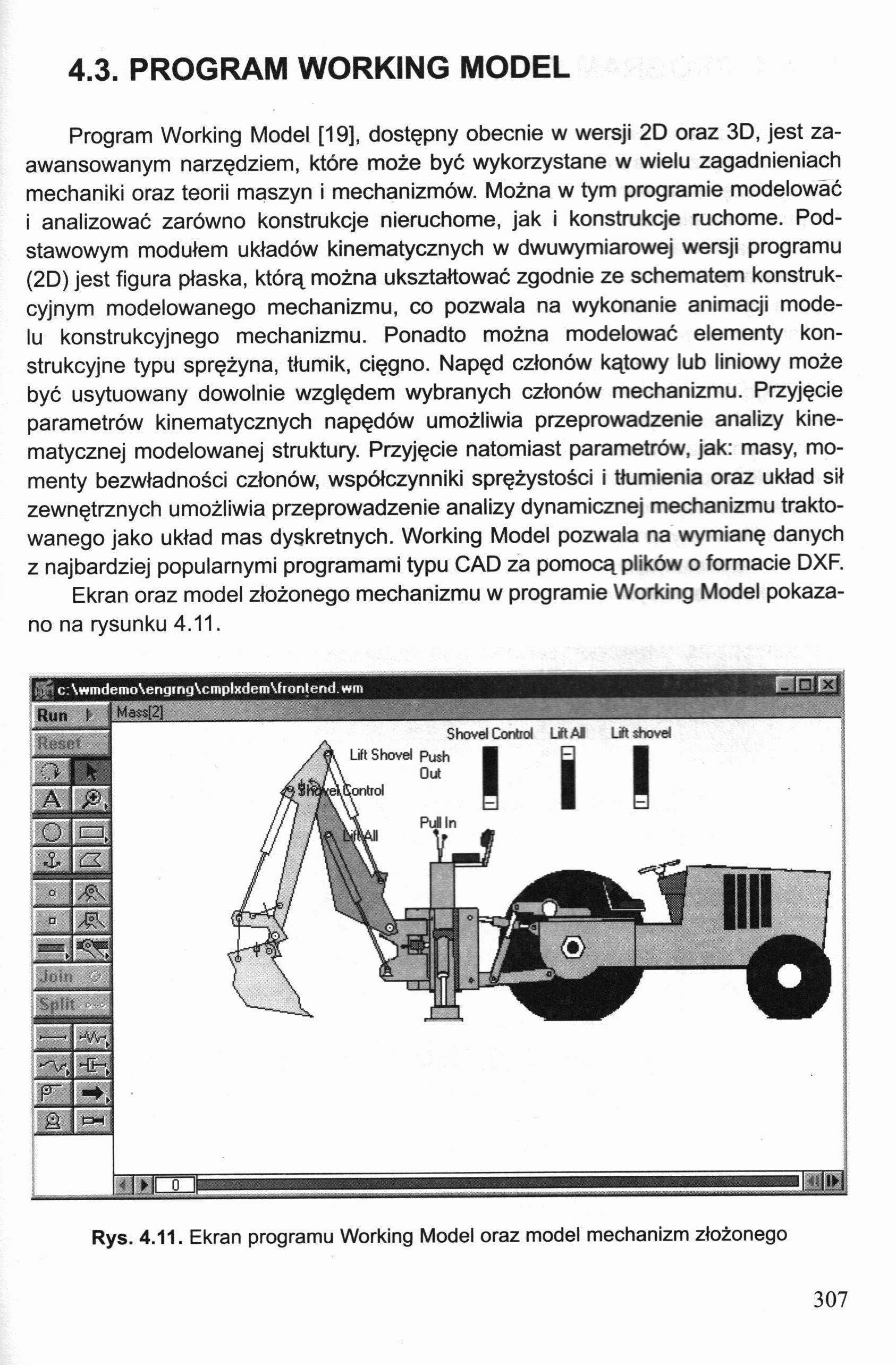
Program Working Model [19], dostępny obecnie w wersji 2D oraz 3D, jest zaawansowanym narzędziem, które może być wykorzystane w wielu zagadnieniach mechaniki oraz teorii maszyn i mechanizmów. Można w tym programie modelować i analizować zarówno konstrukcje nieruchome, jak i konstrukcje ruchome. Podstawowym modułem układów kinematycznych w dwuwymiarowej wersji programu (2D) jest figura płaska, którą można ukształtować zgodnie ze schematem konstrukcyjnym modelowanego mechanizmu, co pozwala na wykonanie animacji modelu konstrukcyjnego mechanizmu. Ponadto można modelować elementy konstrukcyjne typu sprężyna, tłumik, cięgno. Napęd członów kątowy lub liniowy może być usytuowany dowolnie względem wybranych członów mechanizmu. Przyjęcie parametrów kinematycznych napędów umożliwia przeprowadzenie analizy kinematycznej modelowanej struktury. Przyjęcie natomiast parametrów, jak: masy, momenty bezwładności członów, współczynniki sprężystości i tłumienia oraz układ sił zewnętrznych umożliwia przeprowadzenie analizy dynamicznej mechanizmu traktowanego jako układ mas dyskretnych. Working Model pozwala na wymianę danych z najbardziej popularnymi programami typu CAD za pomocą plików o formacie DXF.
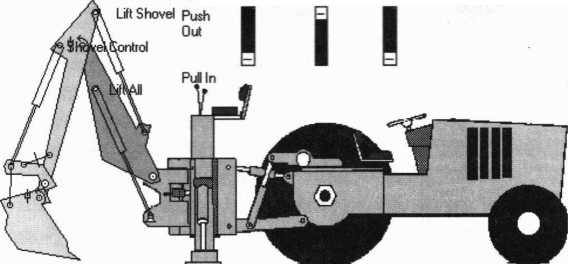
Ekran oraz model złożonego mechanizmu w programie Working Model pokazano na rysunku 4.11.
BlilD
ijifri c: \wmdemo\engmg\cmplxdem\f rontend. wm
Mass[2]
Run t
c=i.
a
&
Join
Shovel Controł Lift Al Litshovd
■''V.
r
a
EM
■HHmi
Rys. 4.11. Ekran programu Working Model oraz model mechanizm złożonego
307
Wyszukiwarka
Podobne podstrony:
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (158) 4.4. PROGRAM WATT W odróżnieniu programów prezentowanych wcześniej, program Watt je
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (148) 4.1.1. Zasady modelowania mechanizmów w programie AKMBudowa mechanizmów dźwigniowyc
24 luty 07 (150) 4.1.2. Cechy geometryczne mechanizmów w programie AKM W celu przeprowadzenia analiz
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (39) Na zakończenie należy zauważyć, że rozpatrywany model tarcia jest słuszny również dl
24 luty 07 (89) Rozwiązanie Rysunek 3.102a przedstawia model fizyczny układu napędowego, natomiast r
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
więcej podobnych podstron