24 luty 07 (54)
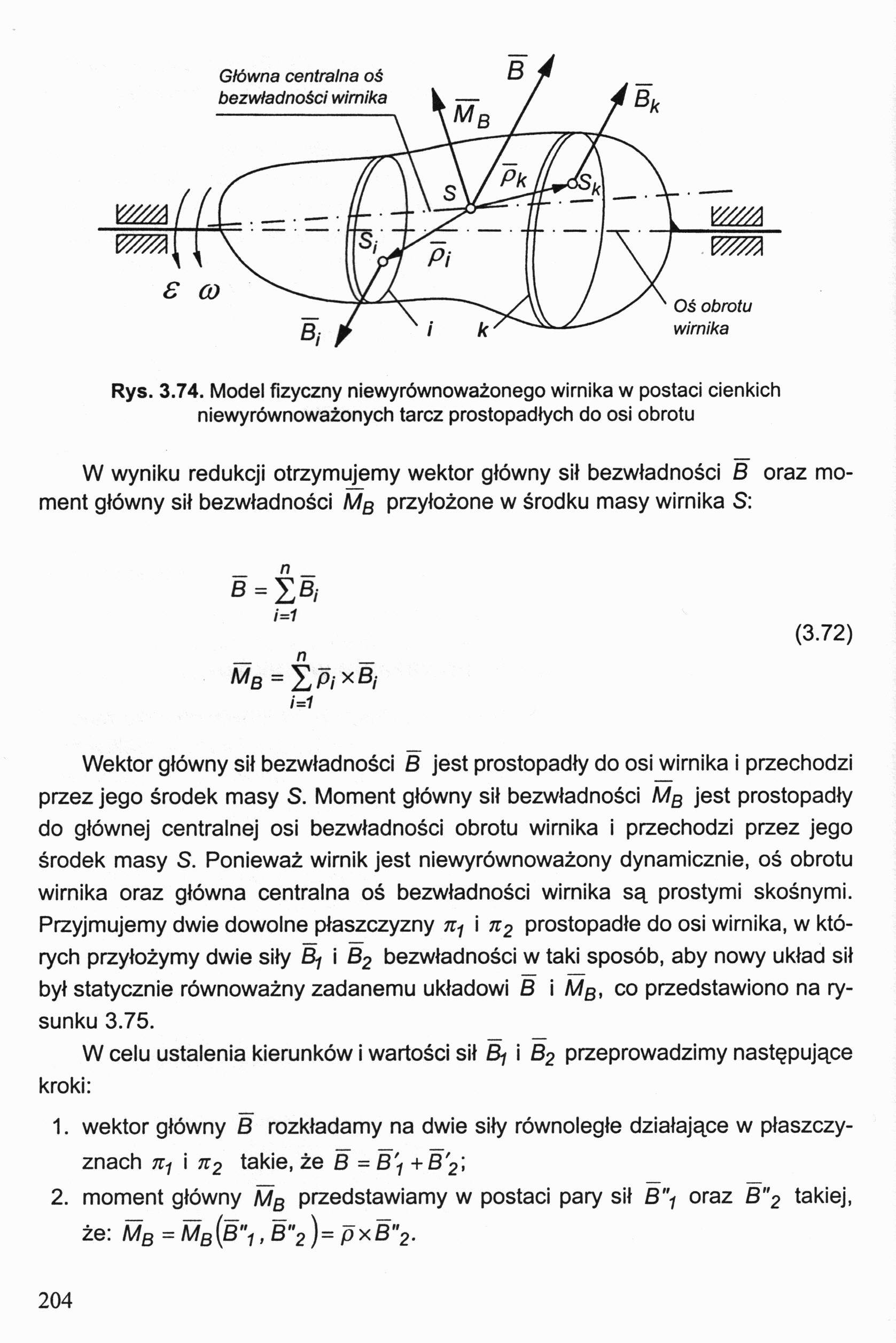
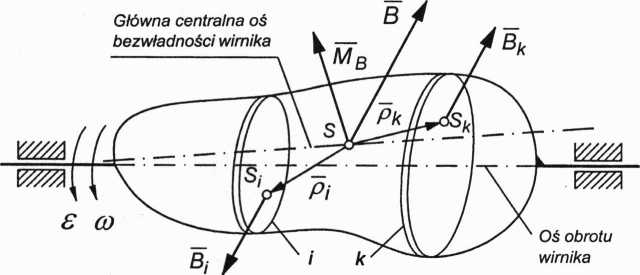
Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównoważonych tarcz prostopadłych do osi obrotu
W wyniku redukcji otrzymujemy wektor główny sił bezwładności B oraz moment główny sił bezwładności MB przyłożone w środku masy wirnika S:
B =
i=1
(3.72)
MB = lPixBi i=1
Wektor główny sił bezwładności B jest prostopadły do osi wirnika i przechodzi przez jego środek masy S. Moment główny sił bezwładności MB jest prostopadły do głównej centralnej osi bezwładności obrotu wirnika i przechodzi przez jego środek masy S. Ponieważ wirnik jest niewyrównoważony dynamicznie, oś obrotu wirnika oraz główna centralna oś bezwładności wirnika są prostymi skośnymi. Przyjmujemy dwie dowolne płaszczyzny n1 i n2 prostopadłe do osi wirnika, w których przyłożymy dwie siły i B2 bezwładności w taki sposób, aby nowy układ sił był statycznie równoważny zadanemu układowi B i MB, co przedstawiono na rysunku 3.75.
W celu ustalenia kierunków i wartości sił ty i B2 przeprowadzimy następujące kroki:
1. wektor główny B rozkładamy na dwie siły równoległe działające w płaszczyznach 7i-j i TT2 takie, że B = B'f +B'2\
2. moment główny MB przedstawiamy w postaci pary sił B"? oraz B"2 takiej, że: Mb = Mb(b"i , B"2)= pxB"2.
204
Wyszukiwarka
Podobne podstrony:
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (157) 4.3. PROGRAM WORKING MODEL Program Working Model [19], dostępny obecnie w wersji 2D
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (94) i wówczas równania (3.113) oraz (3.114) przyjmują postać: Mzr = J7 d(Qzr . dt ’ zr =
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (89) Rozwiązanie Rysunek 3.102a przedstawia model fizyczny układu napędowego, natomiast r
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (137) M. =a-bo) Ns =(a-bw )a N -a- 40 Rys. 3.131. Charakterystyka silnika o momencie lini
więcej podobnych podstron