24 luty 07 (115)
Przykład 3.34
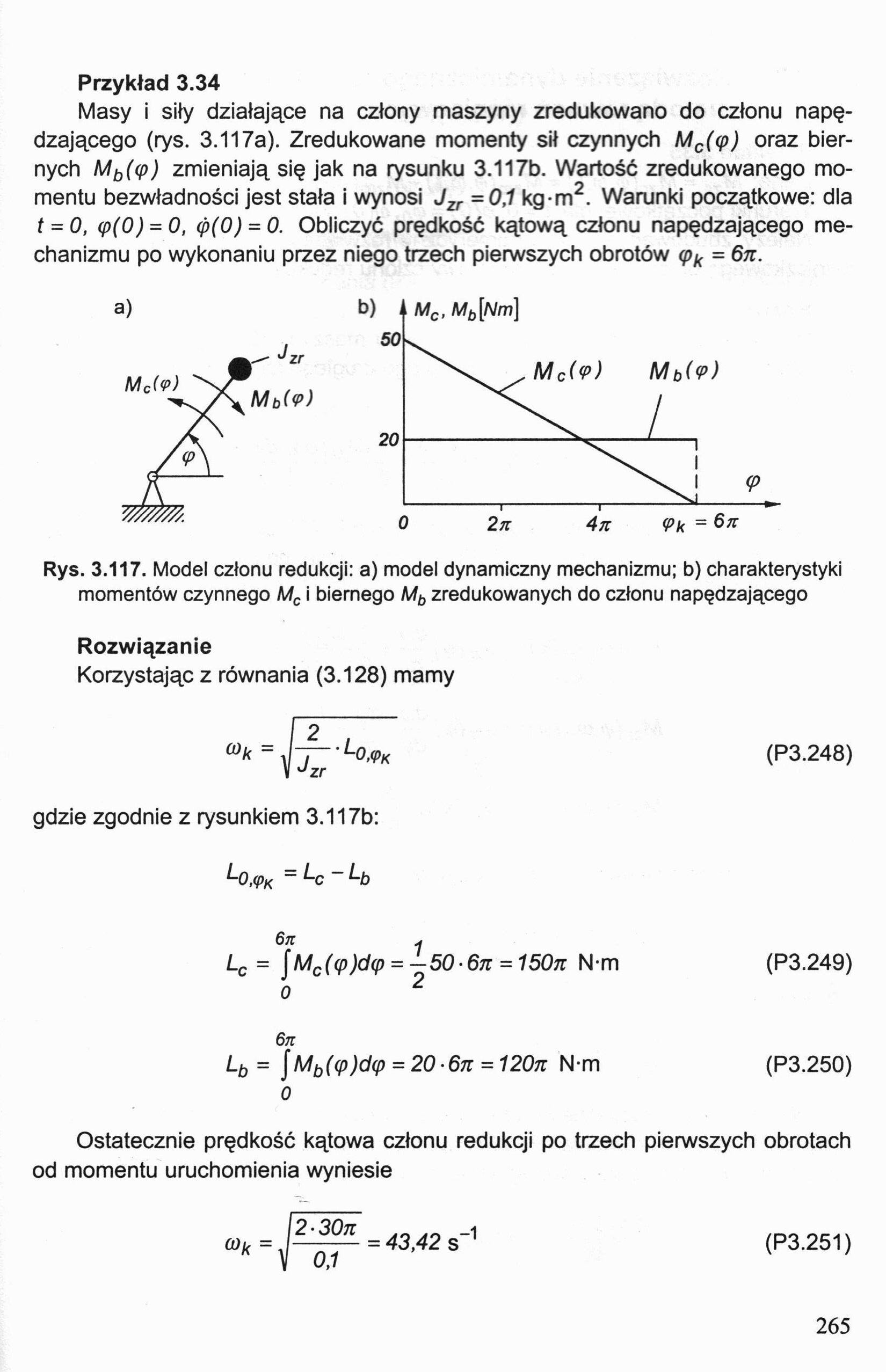
Masy i siły działające na człony maszyny zredukowano do członu napędzającego (rys. 3.117a). Zredukowane momenty sił czynnych Mc(qj) oraz biernych Mb(cp) zmieniają się jak na rysunku 3.117b. Wartość zredukowanego momentu bezwładności jest stała i wynosi Jzr =0,1 kgm2. Warunki początkowe: dla t = 0, (p(0) = 0, <p(0) = 0. Obliczyć prędkość kątową członu napędzającego mechanizmu po wykonaniu przez niego trzech pierwszych obrotów <pk = 6n.
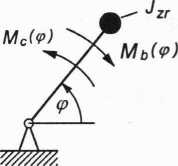
Rys. 3.117. Model członu redukcji: a) model dynamiczny mechanizmu; b) charakterystyki momentów czynnego Mc i biernego Mb zredukowanych do członu napędzającego
Rozwiązanie
Korzystając z równania (3.128) mamy
(P3.248)
gdzie zgodnie z rysunkiem 3.117b:
^~0,ęK ~ Lc ~ l-b
6k j
(P3.249)
Lc = \Mc(ę)dcp = -50-6n = 150n N-m o 2
6n
Lb = \Mb(ę)d(p = 20-6n = 120n N-m (P3.250)
0
Ostatecznie prędkość kątowa członu redukcji po trzech pierwszych obrotach od momentu uruchomienia wyniesie
cok=]l~j^=43,42 s"1 (P3.251)
265
Wyszukiwarka
Podobne podstrony:
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (60) Należy wyznaczyć masy korekcyjne mk1, mk2 oraz ich położenie cpk1, ęk2 tak, aby wyró
24 luty 07 (66) Dane są masy członów mł = m3 =1 kg, m2 =2 kg umieszczone w środkach mas 8-1,82,83 or
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
24 luty 07 (85) Przykład 3.26 Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 sił
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
24 luty 07 (49) strumieni gazów lub cieczy, pól magnetycznych lub elektrycznych itp. Przykładem taki
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (37) Ponieważ obydwie siły przyłożone są w tym samym punkcie S, który porusza się z prędk
24 luty 07 (5) Przykład 3.8 Analiza statyczna metodą Culmana grupy strukturalnej suwak-dźwignia Grup
więcej podobnych podstron