24 luty 07 (72)
Przykład 3.24
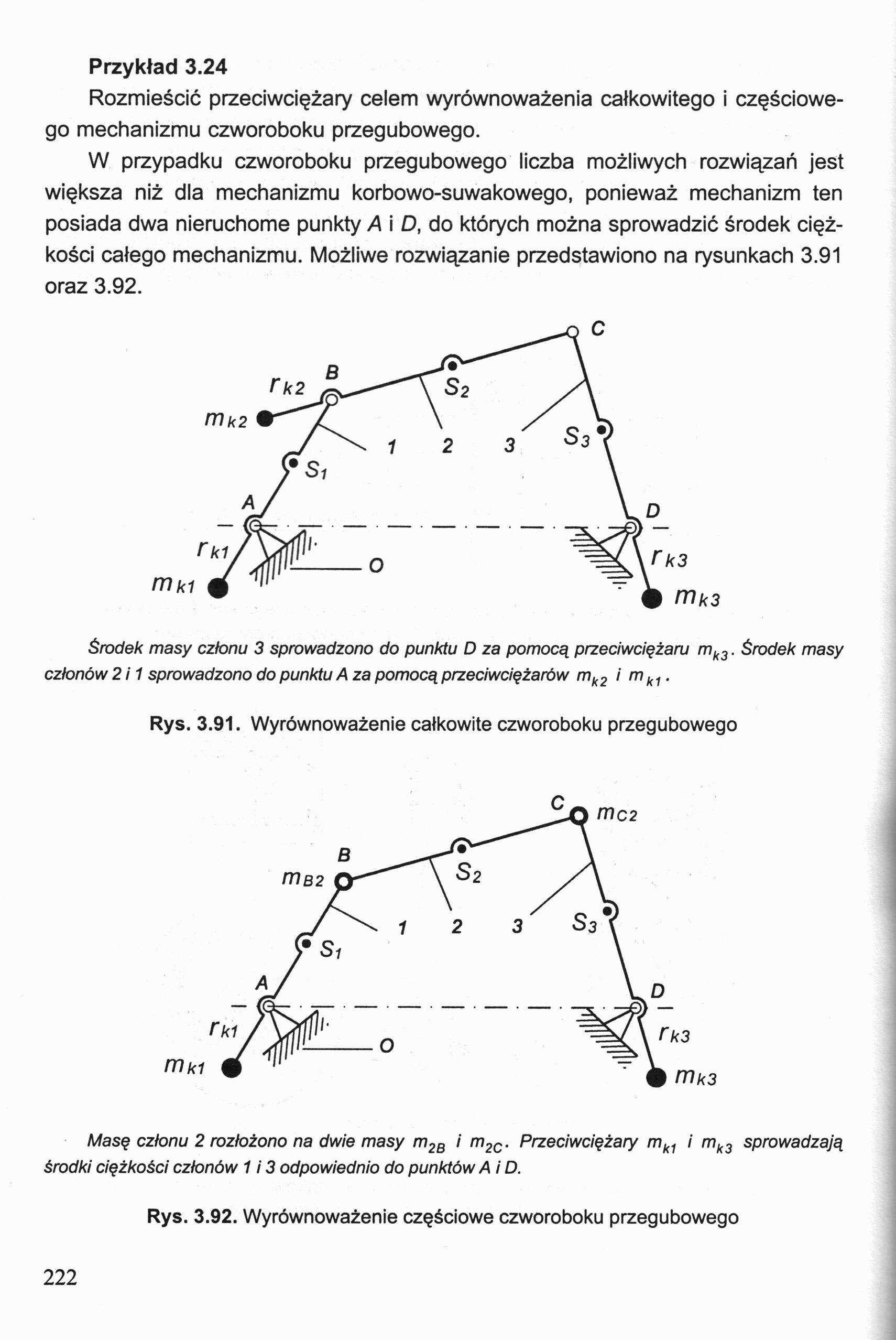
Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowego mechanizmu czworoboku przegubowego.
W przypadku czworoboku przegubowego liczba możliwych rozwiązań jest większa niż dla mechanizmu korbowo-suwakowego, ponieważ mechanizm ten posiada dwa nieruchome punkty A i D, do których można sprowadzić środek ciężkości całego mechanizmu. Możliwe rozwiązanie przedstawiono na rysunkach 3.91 oraz 3.92.
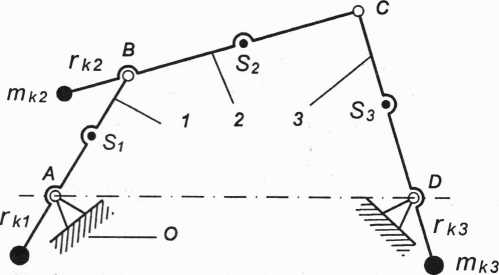
Środek masy członu 3 sprowadzono do punktu D za pomocą przeciwciężaru mk3. Środek masy członów 2 i 1 sprowadzono do punktu A za pomocą przeciwciężarów mk2 i m k1.
Rys. 3.91. Wyrównoważenie całkowite czworoboku przegubowego
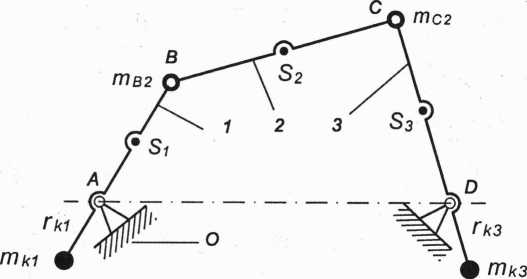
Masę członu 2 rozłożono na dwie masy m2B i m2C. Przeciwciężary mk1 i mk3 sprowadzają środki ciężkości członów 1 i 3 odpowiednio do punktów A i D.
Rys. 3.92. Wyrównoważenie częściowe czworoboku przegubowego
222
Wyszukiwarka
Podobne podstrony:
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (85) Przykład 3.26 Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 sił
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
24 luty 07 (45) Sprawność chwilowa dla przyjętych na rysunku parametrów geometrycznych mechanizmu kr
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
więcej podobnych podstron