23 luty 07 (23)
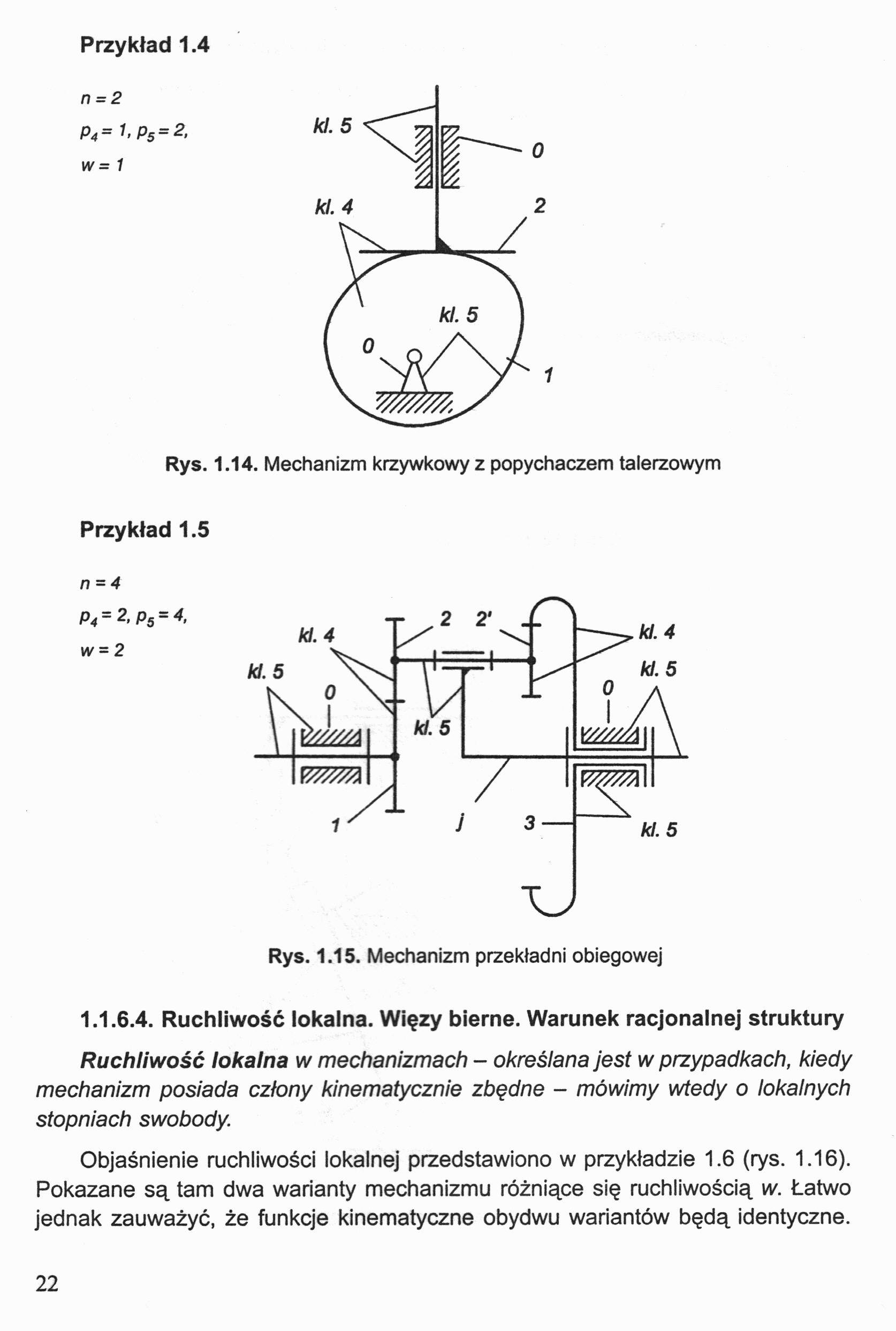
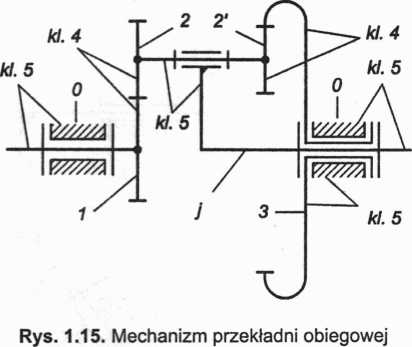
n = 2
p4= 1, ps = 2, iv= 1
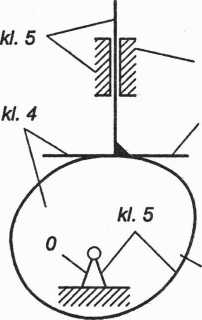
Rys. 1.14. Mechanizm krzywkowy z popychaczem talerzowym Przykład 1.5
1.1.6.4. Ruchliwość lokalna. Więzy bierne. Warunek racjonalnej struktury
Ruchliwość lokalna w mechanizmach - określana jest w przypadkach, kiedy mechanizm posiada człony kinematycznie zbędne - mówimy wtedy o lokalnych stopniach swobody.
Objaśnienie ruchliwości lokalnej przedstawiono w przykładzie 1.6 (rys. 1.16). Pokazane są tam dwa warianty mechanizmu różniące się ruchliwością w. Łatwo jednak zauważyć, że funkcje kinematyczne obydwu wariantów będą identyczne.
22
Wyszukiwarka
Podobne podstrony:
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (2) / JÓZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIKCZĘŚĆ IANALIZA MECHANIZMÓW UCZ6.NIAN6
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
więcej podobnych podstron