23 luty 07 (28)
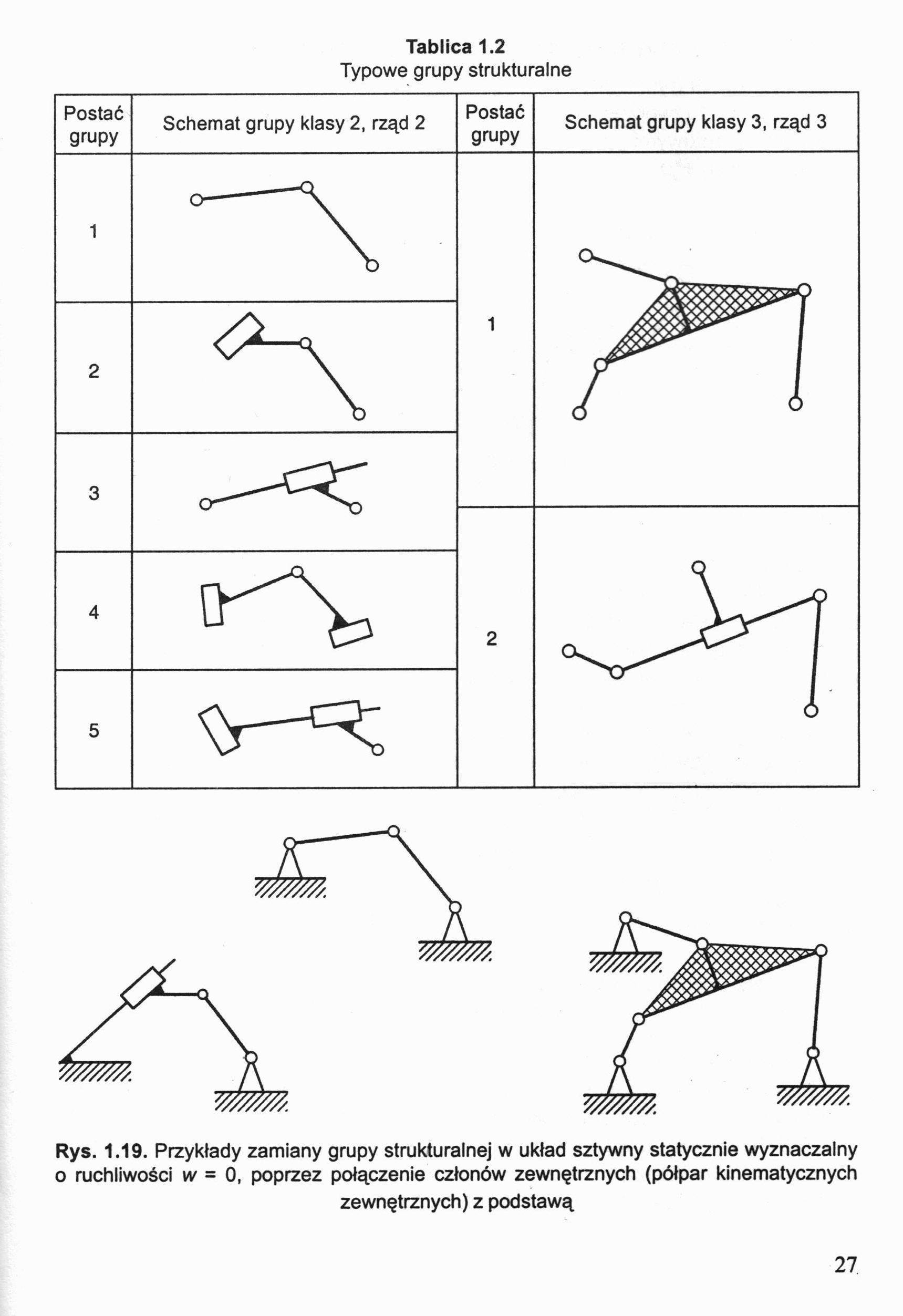
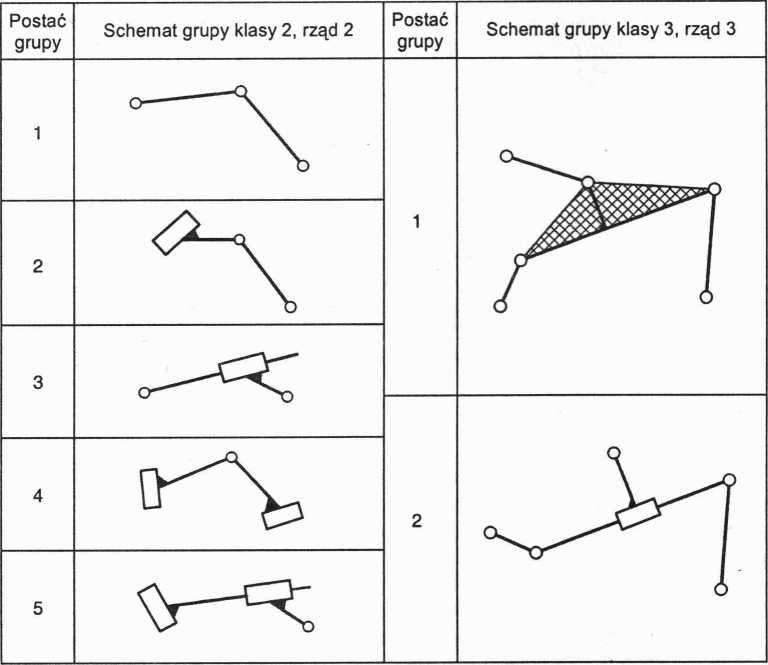
Tablica 1.2
Typowe grupy strukturalne
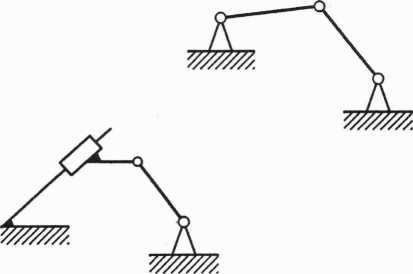
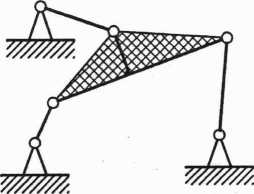
Rys. 1.19. Przykłady zamiany grupy strukturalnej w układ sztywny statycznie wyznaczalny o ruchliwości w = 0, poprzez połączenie członów zewnętrznych (półpar kinematycznych
zewnętrznych) z podstawą
27
Wyszukiwarka
Podobne podstrony:
23 luty 07 (31) Tablica 1.3 Schematy mechanizmów podstawowych klasy 2 z członem napędzającym 30
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (25) Przykład 1.7 (rys. 1.17)Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma
23 luty 07 (26) 1.2. KLASYFIKACJA MECHANIZMÓW1.2.1. Zasady klasyfikacji strukturalnej mechanizmów pł
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (37) 1.2.2. Zasady klasyfikacji funkcjonalnej mechanizmów Klasyfikacja strukturalna mecha
23 luty 07 (9) 1. STRUKTURA MECHANIZMÓW1.1. POJĘCIA PODSTAWOWE1.1.1. &
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
więcej podobnych podstron