23 luty 07 (146)
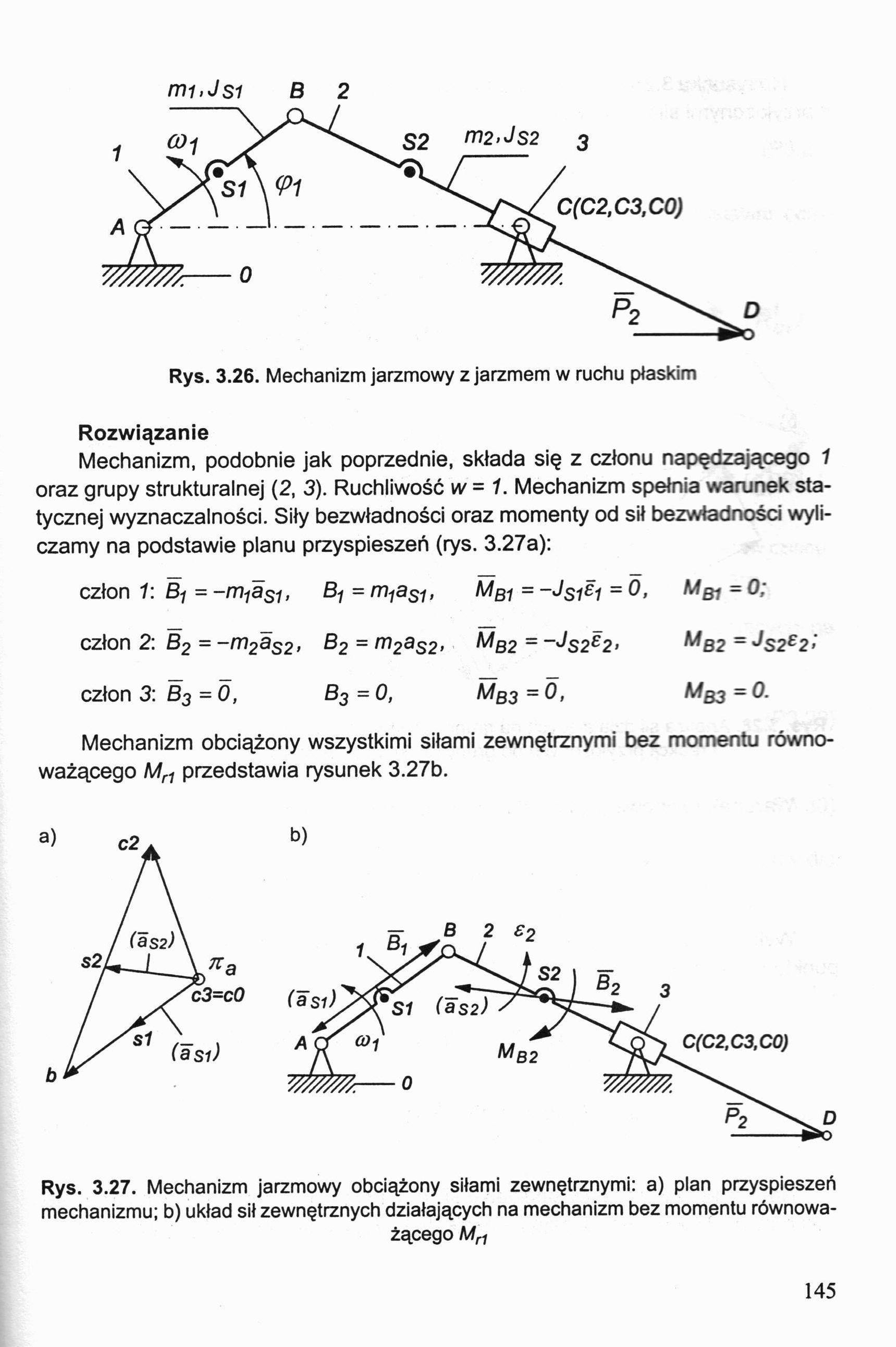
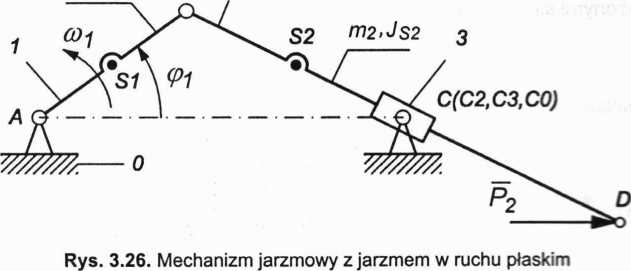
mi,Jsi B 2
Rozwiązanie
Mechanizm, podobnie jak poprzednie, składa się z członu napędzającego 1 oraz grupy strukturalnej (2, 3). Ruchliwość w = 1. Mechanizm spełnia warunek statycznej wyznaczainości. Siły bezwładności oraz momenty od sił bezwładności wyliczamy na podstawie planu przyspieszeń (rys. 3.27a):
człon 1: B-, = B-, = mtaSł, MB1 = -Jsi£i = 0, = 0;
Człon 2: 63 =-^352' = m2aS2> ^B2=~^S2a2> Mf}2 = Js2e2’
człon 3: 63 = 0, 63 - 0, M33 = 0, A/f33 = 0.
Mechanizm obciążony wszystkimi siłami zewnętrznymi bez momentu równoważącego Mr1 przedstawia rysunek 3.27b.
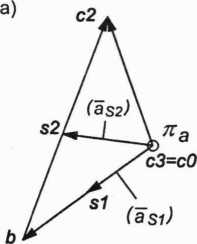
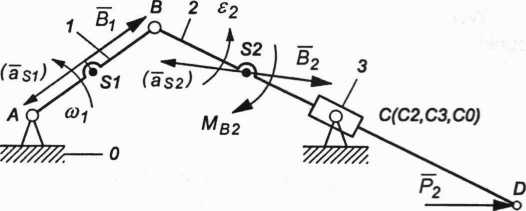
Rys. 3.27. Mechanizm jarzmowy obciążony siłami zewnętrznymi: a) plan przyspieszeń mechanizmu; b) układ sił zewnętrznych działających na mechanizm bez momentu równoważącego Mr1
145
Wyszukiwarka
Podobne podstrony:
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (36) Tabela 1.2 Klasyfikacja funkcjonalna mechanizmów Rodzaj łańcucha
23 luty 07 (37) 1.2.2. Zasady klasyfikacji funkcjonalnej mechanizmów Klasyfikacja strukturalna mecha
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (75) Obecnie ma mniejsze znaczenie jako metoda graficznego rozwiązywania problemów kinema
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (113) 3. DYNAMIKA MECHANIZMÓW I MASZYN3.1. CELI ZAKRESANALIZY DYNAMICZNEJ MECHANIZMÓW Dyn
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
więcej podobnych podstron