23 luty 07 (59)
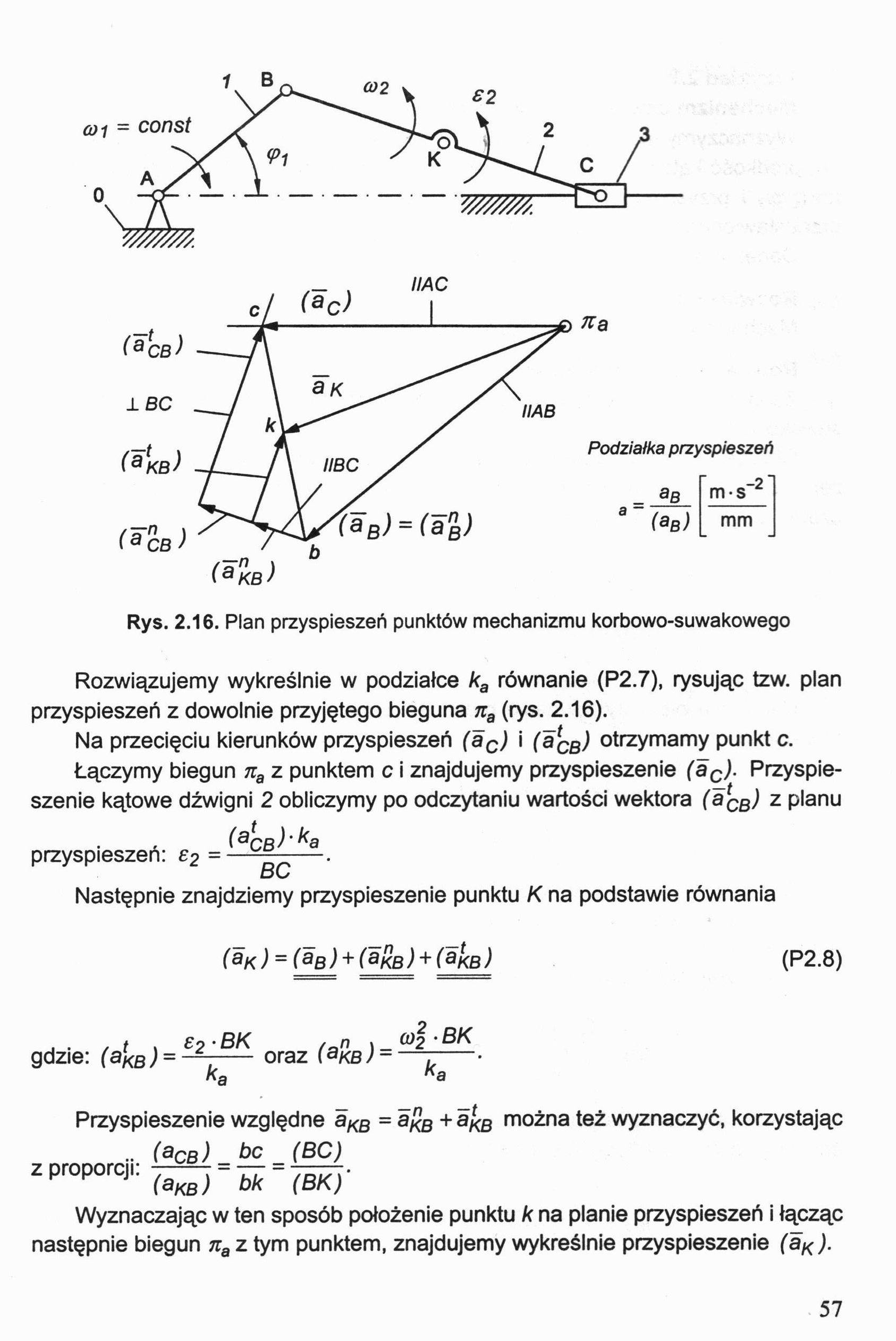
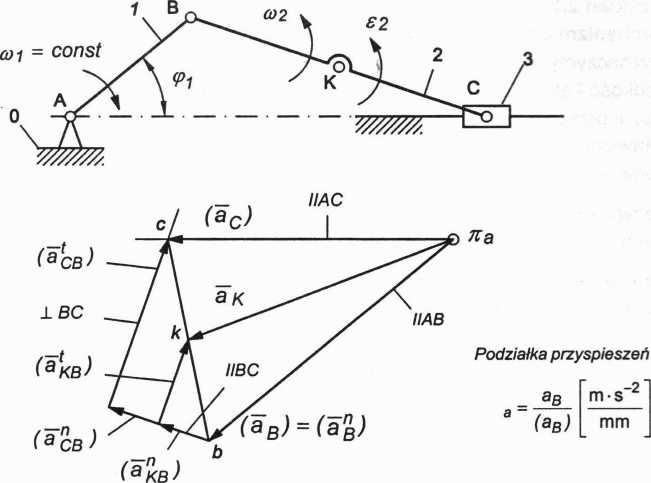
Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego
Rozwiązujemy wykreślnie w podziałce ka równanie (P2.7), rysując tzw. plan przyspieszeń z dowolnie przyjętego bieguna na (rys. 2.16).
Na przecięciu kierunków przyspieszeń (ac) i (ałCB) otrzymamy punkt c. Łączymy biegun na z punktem c i znajdujemy przyspieszenie (ac). Przyspieszenie kątowe dźwigni 2 obliczymy po odczytaniu wartości wektora (aQB) z planu
(aCB)'^3
przyspieszeń: e2 = —^—•
Następnie znajdziemy przyspieszenie punktu K na podstawie równania
(P2.8)
(aK) = (aB) + (a[lB) + (aKB)
, . . t . eo BK ,-n , (Ą-BK
gdzie: (aKB) = -±--oraz (aKB ) — —r-•
K_ Aa
Przyspieszenie względne aKB = a^B + a^e można też wyznaczyć, korzystając .. (aCB) bc (BC)
zproporci,: m = W)'
Wyznaczając w ten sposób położenie punktu k na planie przyspieszeń i łącząc następnie biegun na z tym punktem, znajdujemy wykreślnie przyspieszenie (aK ).
51
Wyszukiwarka
Podobne podstrony:
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (63) Na przecięciu kierunków przyspieszeń (afKB) i (afKC) otrzymamy punkt k. Biegun na łą
23 luty 07 (66) Łącząc biegun planu przyspieszeń na z punktem przecięcia b2 otrzymamy wartość przysp
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
więcej podobnych podstron