23 luty 07 (10)
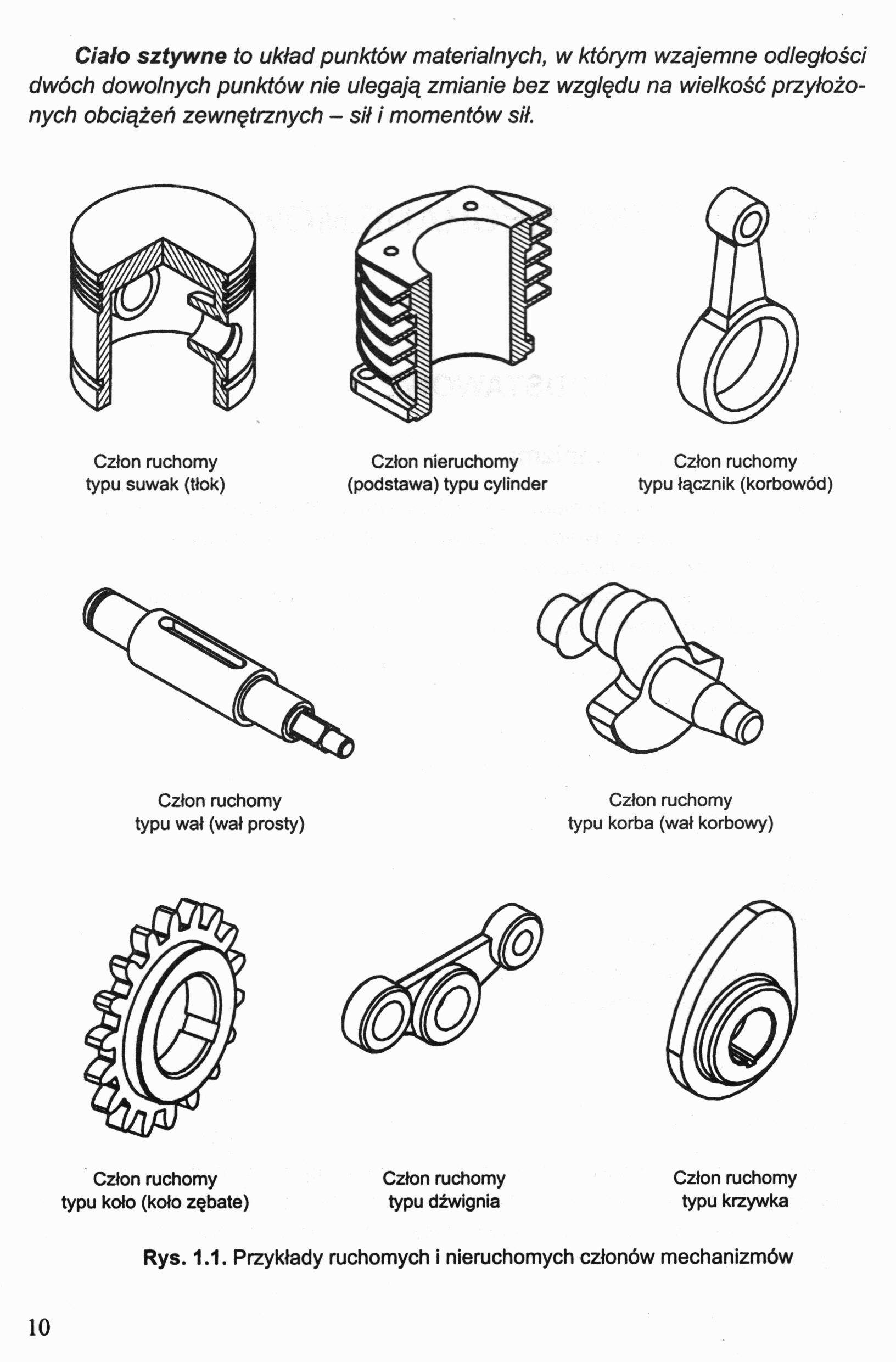
Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowolnych punktów nie ulegają zmianie bez względu na wielkość przyłożonych obciążeń zewnętrznych - sił i momentów sił.
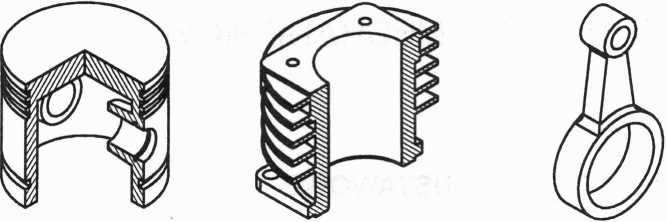
Człon ruchomy typu suwak (tłok)
Człon nieruchomy (podstawa) typu cylinder
Człon ruchomy typu łącznik (korbowód)

Człon ruchomy typu wał (wał prosty)
Człon ruchomy typu korba (wał korbowy)
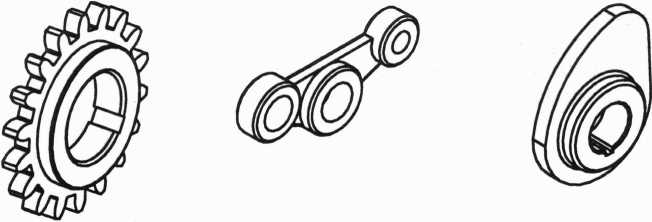
Człon ruchomy typu koło (koło zębate)
Człon ruchomy typu dźwignia
Człon ruchomy typu krzywka
Rys. 1.1. Przykłady ruchomych i nieruchomych członów mechanizmów
10
Wyszukiwarka
Podobne podstrony:
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
23 luty 07 (84) Przekształcamy układ równań (P2.52) do postaci: If coscpi +l2 cos(p2 -10 = -l3 cosę3
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (68) Ponieważ suwak 3 obraca się razem z jarzmem, to jego prędkość kątowa jest równa pręd
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
23 luty 07 (74) 71 a2.2.4. Metoda toru ocechowanego Metoda toru ocechowanego jest to metoda grafoana
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
FILTRA vl.O (C) 2009 - kompilacja: poniedziałek, 23 luty 2009, 10:16:08 SB Opcje Analiza granulometr
82884 Zdjęcie0082 (10) CIAŁO SZTYWNE W PRZESTRZEC
więcej podobnych podstron