23 luty 07 (55)
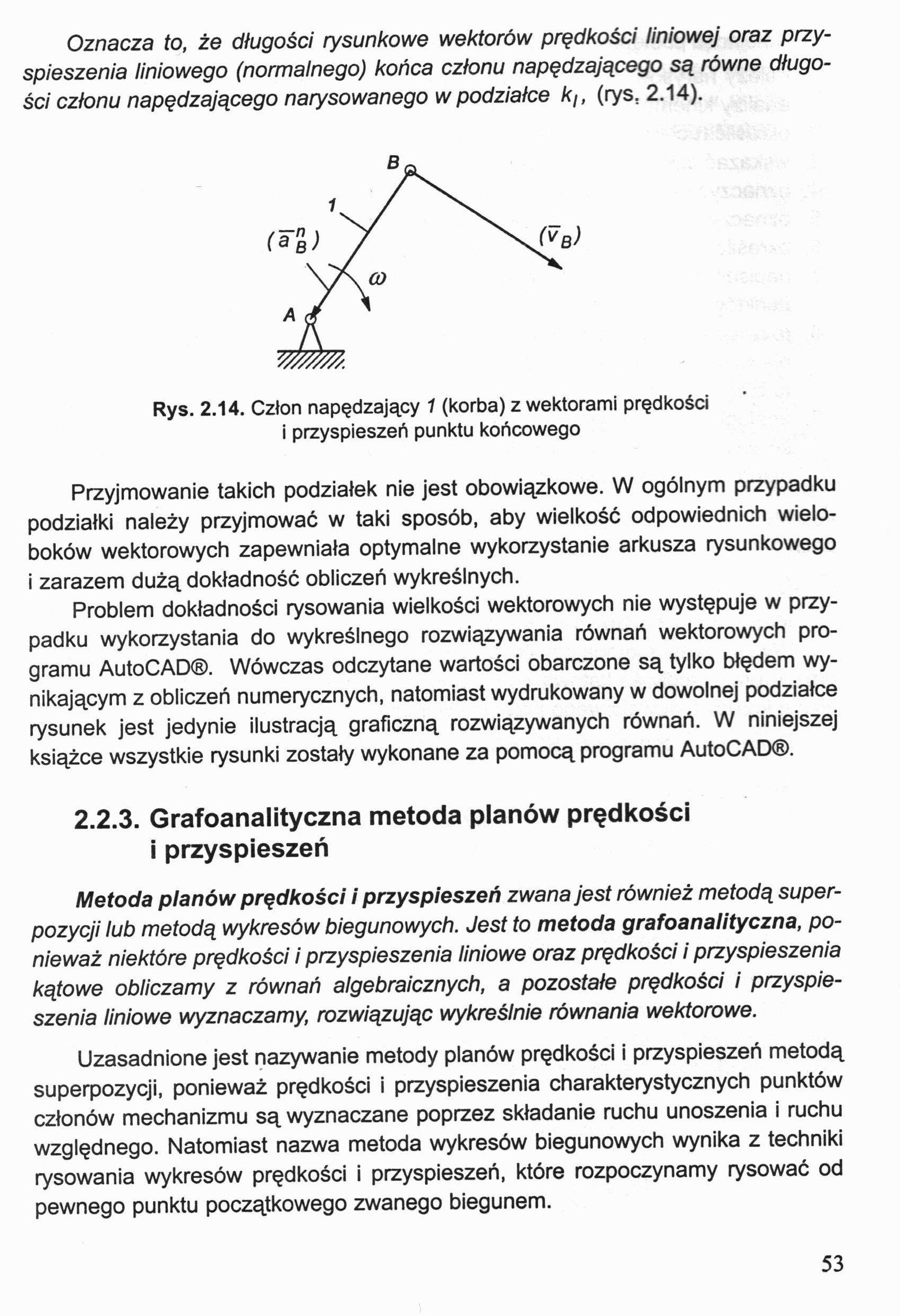
Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia liniowego (normalnego) końca członu napędzającego są równe długości członu napędzającego narysowanego w podziałce kh (rys. 2.14).
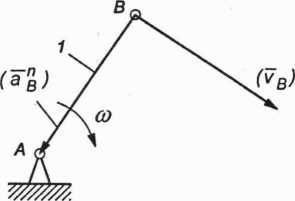
Rys. 2.14. Człon napędzający 1 (korba) z wektorami prędkości i przyspieszeń punktu końcowego
Przyjmowanie takich podziałek nie jest obowiązkowe. W ogólnym przypadku podziałki należy przyjmować w taki sposób, aby wielkość odpowiednich wielo-boków wektorowych zapewniała optymalne wykorzystanie arkusza rysunkowego i zarazem dużą dokładność obliczeń wykreślnych.
Problem dokładności rysowania wielkości wektorowych nie występuje w przypadku wykorzystania do wykreślnego rozwiązywania równań wektorowych programu AutoCAD®. Wówczas odczytane wartości obarczone są tylko błędem wynikającym z obliczeń numerycznych, natomiast wydrukowany w dowolnej podziałce rysunek jest jedynie ilustracją graficzną rozwiązywanych równań. W niniejszej książce wszystkie rysunki zostały wykonane za pomocą programu AutoCAD®.
2.2.3. Grafoanalityczna metoda planów prędkości i przyspieszeń
Metoda planów prędkości i przyspieszeń zwana jest również metodą superpozycji lub metodą wykresów biegunowych. Jest to metoda grafoanalityczna, ponieważ niektóre prędkości i przyspieszenia liniowe oraz prędkości i przyspieszenia kątowe obliczamy z równań algebraicznych, a pozostałe prędkości i przyspieszenia liniowe wyznaczamy, rozwiązując wykreślnie równania wektorowe.
Uzasadnione jest nazywanie metody planów prędkości i przyspieszeń metodą superpozycji, ponieważ prędkości i przyspieszenia charakterystycznych punktów członów mechanizmu są wyznaczane poprzez składanie ruchu unoszenia i ruchu względnego. Natomiast nazwa metoda wykresów biegunowych wynika z techniki rysowania wykresów prędkości i przyspieszeń, które rozpoczynamy rysować od pewnego punktu początkowego zwanego biegunem.
53
Wyszukiwarka
Podobne podstrony:
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (80) dl ‘ Dla prowadnic prostoliniowych wyrażenie -i- określa prędkość liniową dt skracan
img048 48 3.1 1. U wagi końcowe gdzie W*™ jest iloczynem macierzy W* i Wm. Oznacza to, że związek po
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (143) Równanie (P3.14) zawiera teraz tylko dwie niewiadome oraz R12 oraz RS:3. (P3.16) R^
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
54 55 (14) 54Układy równań liniowych Z otrzymanej postaci wynika, ze rz A = 2 = rz [/4
dydaktyka2�3 osób za pomocą sygnałów, czyli mowy ciała. Oznacza to, że najwięcej informacji, bo 55%,
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (62) Należy zwrócić uwagę, że trójkąt bek jest podobny do trójkąta BCK i obrócony 0
więcej podobnych podstron