23 luty 07 (101)


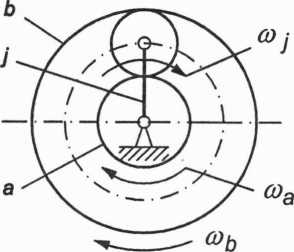
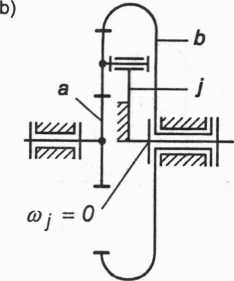
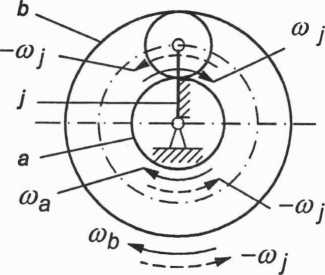
Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) bezwzględne prędkości kątowe członów przekładni o dwóch stopniach swobody, tj. coa, cob, Wj, b) względne prędkości kątowe członów przekładni po nadaniu całej przekładni prędkości kątowej {-coj), tj. coa - coj, cob - coj, a)j- (Oj = 0
Przełożenie kierunkowe pomiędzy kołem a i kołem b przekładni przy unieruchomionym w ten sposób jarzmie zapiszemy w postaci zależności zwanej wzorem Willisa

(Oą ~(Oj COb ~(Oj
(2.48)
gdzie iJgb - przełożenie kierunkowe od członu a do b przy nieruchomym jarzmie j.
Jest to podstawowy wzór, z którego można wyliczyć wszystkie możliwe przełożenia przekładni obiegowej. Dla przekładni o jednym stopniu swobody, w której
100
Wyszukiwarka
Podobne podstrony:
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (80) dl ‘ Dla prowadnic prostoliniowych wyrażenie -i- określa prędkość liniową dt skracan
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (110) Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywni
więcej podobnych podstron