23 luty 07 (18)
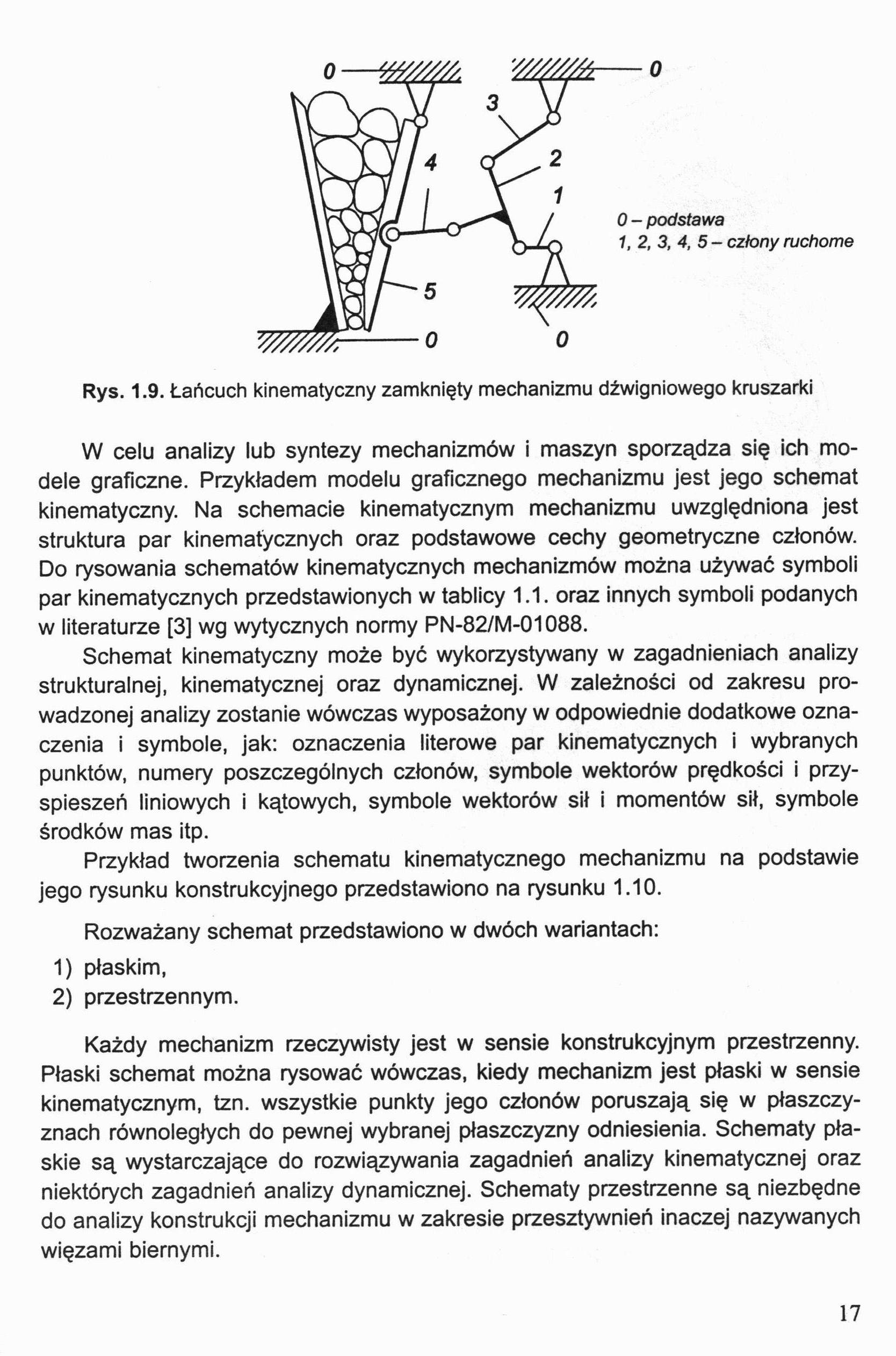
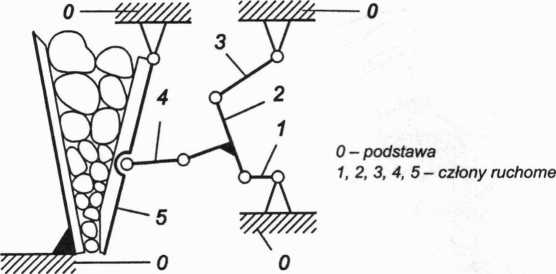
Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki
W celu analizy lub syntezy mechanizmów i maszyn sporządza się ich modele graficzne. Przykładem modelu graficznego mechanizmu jest jego schemat kinematyczny. Na schemacie kinematycznym mechanizmu uwzględniona jest struktura par kinematycznych oraz podstawowe cechy geometryczne członów. Do rysowania schematów kinematycznych mechanizmów można używać symboli par kinematycznych przedstawionych w tablicy 1.1. oraz innych symboli podanych w literaturze [3] wg wytycznych normy PN-82/M-01088.
Schemat kinematyczny może być wykorzystywany w zagadnieniach analizy strukturalnej, kinematycznej oraz dynamicznej. W zależności od zakresu prowadzonej analizy zostanie wówczas wyposażony w odpowiednie dodatkowe oznaczenia i symbole, jak: oznaczenia literowe par kinematycznych i wybranych punktów, numery poszczególnych członów, symbole wektorów prędkości i przyspieszeń liniowych i kątowych, symbole wektorów sił i momentów sił, symbole środków mas itp.
Przykład tworzenia schematu kinematycznego mechanizmu na podstawie jego rysunku konstrukcyjnego przedstawiono na rysunku 1.10.
Rozważany schemat przedstawiono w dwóch wariantach:
1) płaskim,
2) przestrzennym.
Każdy mechanizm rzeczywisty jest w sensie konstrukcyjnym przestrzenny. Płaski schemat można rysować wówczas, kiedy mechanizm jest płaski w sensie kinematycznym, tzn. wszystkie punkty jego członów poruszają się w płaszczyznach równoległych do pewnej wybranej płaszczyzny odniesienia. Schematy płaskie są wystarczające do rozwiązywania zagadnień analizy kinematycznej oraz niektórych zagadnień analizy dynamicznej. Schematy przestrzenne są niezbędne do analizy konstrukcji mechanizmu w zakresie przesztywnień inaczej nazywanych więzami biernymi.
17
Wyszukiwarka
Podobne podstrony:
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
więcej podobnych podstron