23 luty 07 (30)
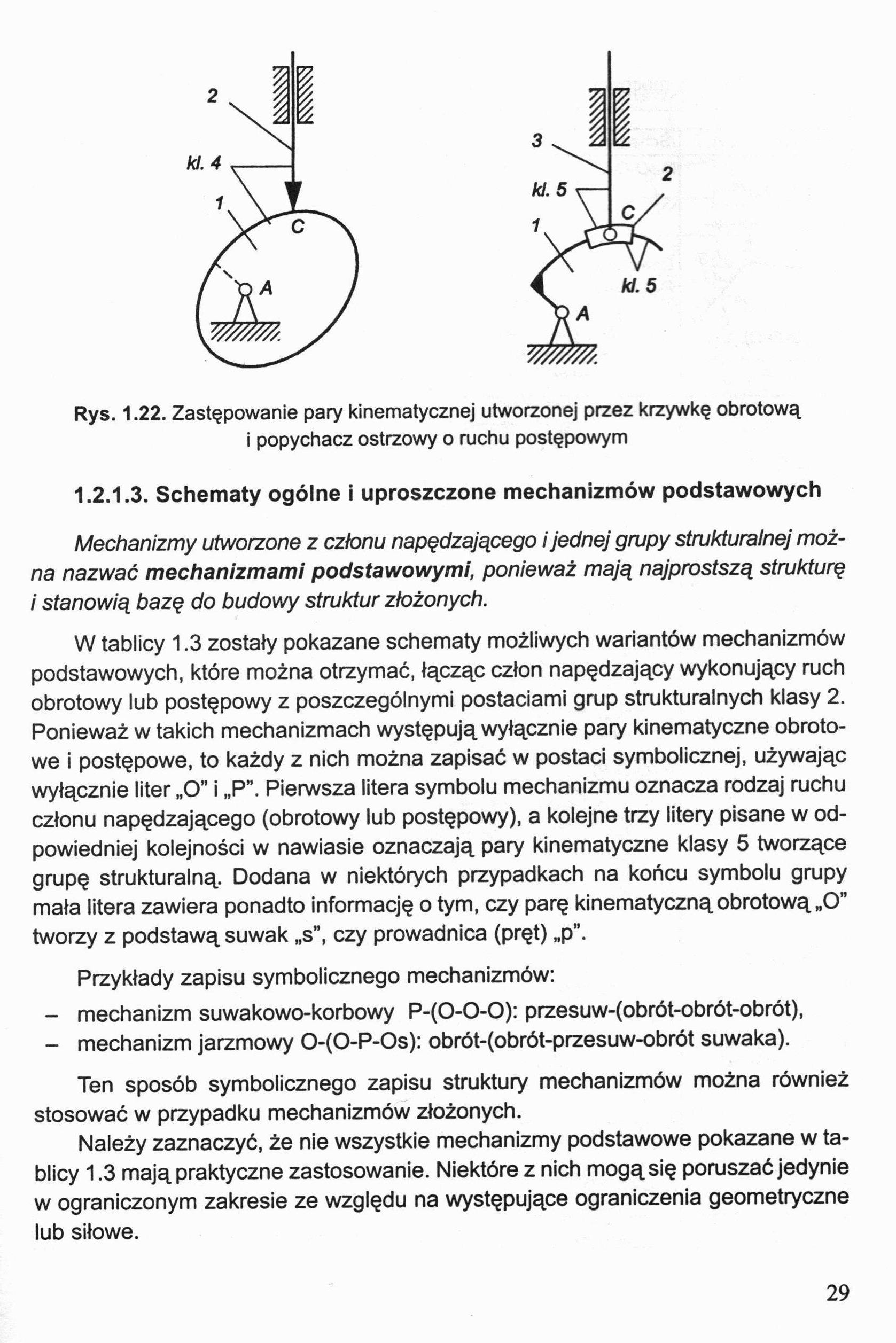
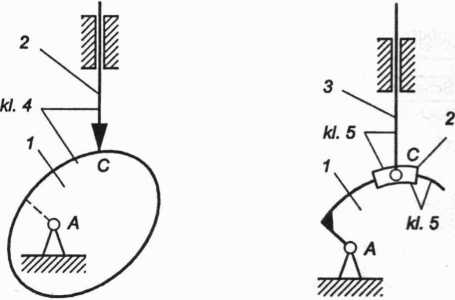
Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popychacz ostrzowy o ruchu postępowym
1.2.1.3. Schematy ogólne i uproszczone mechanizmów podstawowych
Mechanizmy utworzone z członu napędzającego i jednej grupy strukturalnej można nazwać mechanizmami podstawowymi, ponieważ mają najprostszą strukturę i stanowią bazę do budowy struktur złożonych.
W tablicy 1.3 zostały pokazane schematy możliwych wariantów mechanizmów podstawowych, które można otrzymać, łącząc człon napędzający wykonujący ruch obrotowy lub postępowy z poszczególnymi postaciami grup strukturalnych klasy 2. Ponieważ w takich mechanizmach występują wyłącznie pary kinematyczne obrotowe i postępowe, to każdy z nich można zapisać w postaci symbolicznej, używając wyłącznie liter „O” i „P”. Pierwsza litera symbolu mechanizmu oznacza rodzaj ruchu członu napędzającego (obrotowy lub postępowy), a kolejne trzy litery pisane w odpowiedniej kolejności w nawiasie oznaczają pary kinematyczne klasy 5 tworzące grupę strukturalną. Dodana w niektórych przypadkach na końcu symbolu grupy mała litera zawiera ponadto informację o tym, czy parę kinematyczną obrotową „O” tworzy z podstawą suwak „s”, czy prowadnica (pręt) „p”.
Przykłady zapisu symbolicznego mechanizmów:
- mechanizm suwakowo-korbowy P-(O-O-O): przesuw-(obrót-obrót-obrót),
- mechanizm jarzmowy O-(O-P-Os): obrót-(obrót-przesuw-obrót suwaka).
Ten sposób symbolicznego zapisu struktury mechanizmów można również stosować w przypadku mechanizmów złożonych.
Należy zaznaczyć, że nie wszystkie mechanizmy podstawowe pokazane w tablicy 1.3 mają praktyczne zastosowanie. Niektóre z nich mogą się poruszać jedynie w ograniczonym zakresie ze względu na występujące ograniczenia geometryczne lub siłowe.
29
Wyszukiwarka
Podobne podstrony:
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
więcej podobnych podstron