23 luty 07 (17)
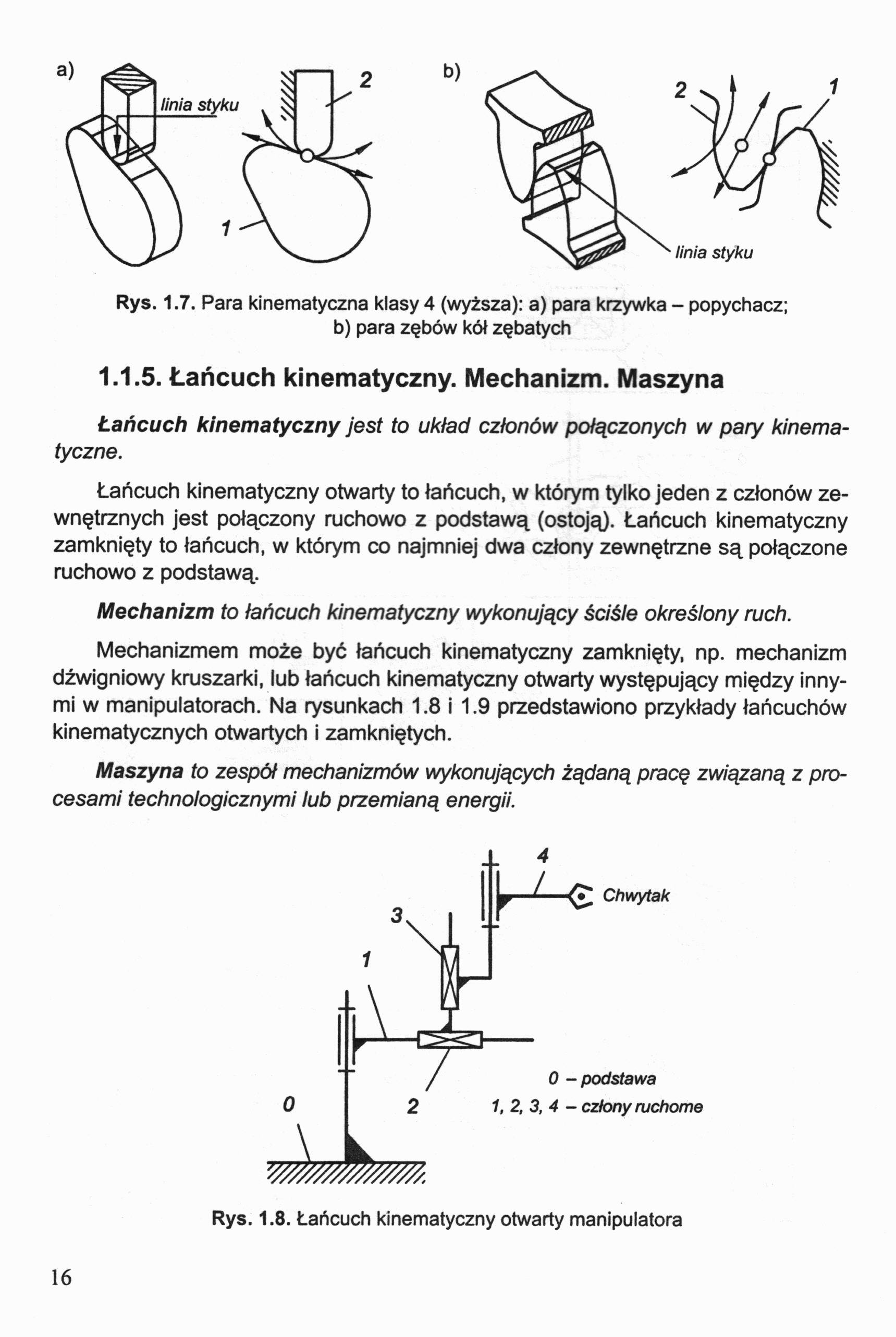
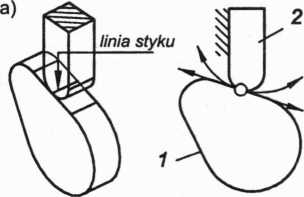
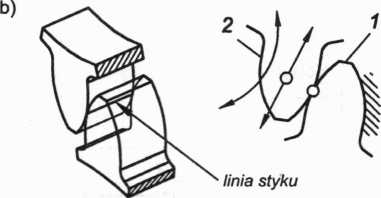
Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para zębów kół zębatych
1.1.5. Łańcuch kinematyczny. Mechanizm. Maszyna
Łańcuch kinematyczny jest to układ członów połączonych w pary kinematyczne.
Łańcuch kinematyczny otwarty to łańcuch, w którym tylko jeden z członów zewnętrznych jest połączony ruchowo z podstawą (ostoją). Łańcuch kinematyczny zamknięty to łańcuch, w którym co najmniej dwa człony zewnętrzne są połączone ruchowo z podstawą.
Mechanizm to łańcuch kinematyczny wykonujący ściśle określony ruch.
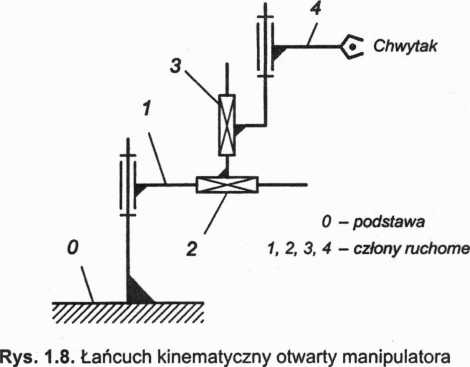
Mechanizmem może być łańcuch kinematyczny zamknięty, np. mechanizm dźwigniowy kruszarki, lub łańcuch kinematyczny otwarty występujący między innymi w manipulatorach. Na rysunkach 1.8 i 1.9 przedstawiono przykłady łańcuchów kinematycznych otwartych i zamkniętych.
Maszyna to zespół mechanizmów wykonujących żądaną pracę związaną z procesami technologicznymi lub przemianą energii.
16
Wyszukiwarka
Podobne podstrony:
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (15) 1.1.4. Klasyfikacja par kinematycznych Przez klasę pary kinematycznej „i" (i =
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
więcej podobnych podstron