23 luty 07 (149)
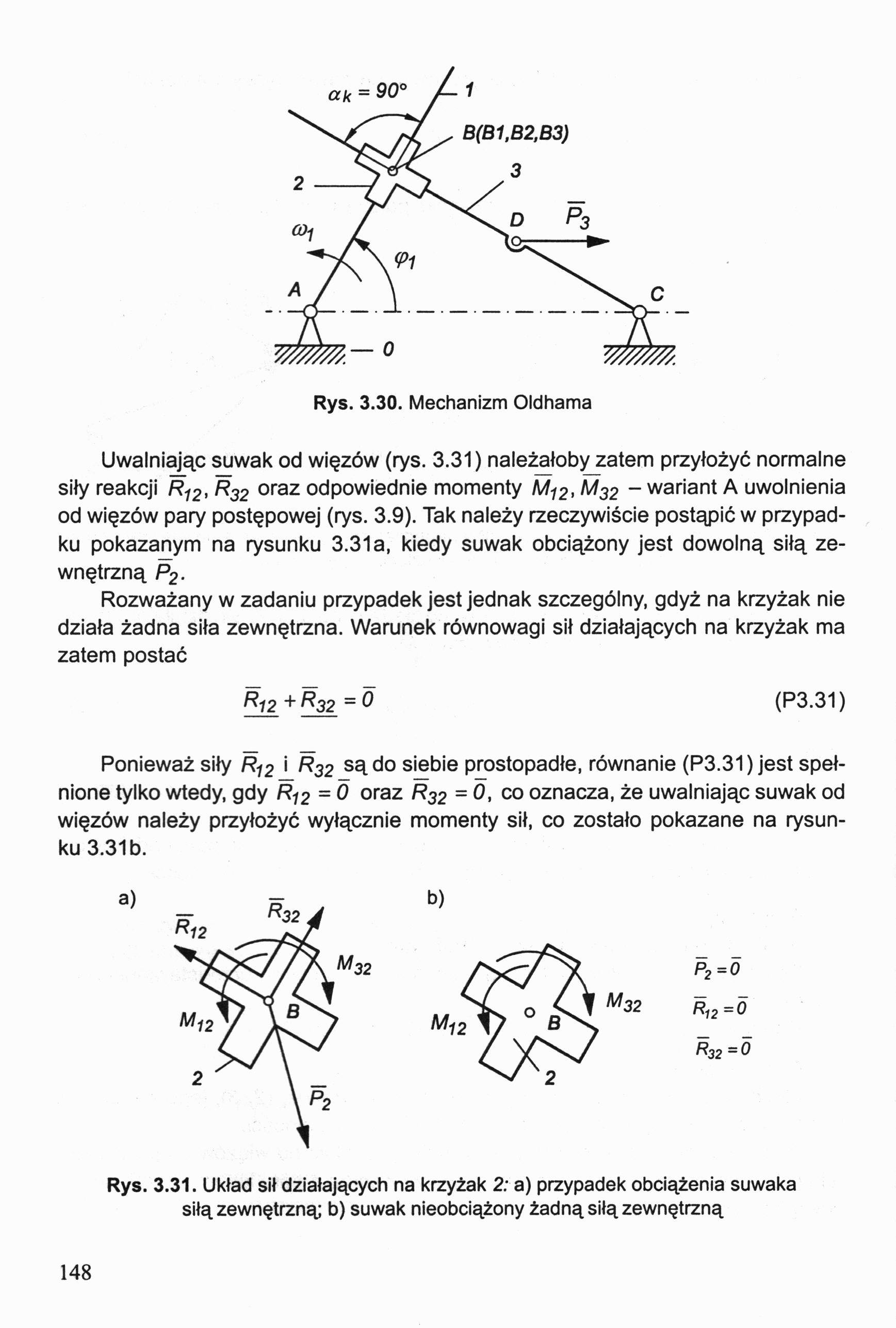
Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reakcji R12, R32 oraz odpowiednie momenty M12, M32 - wariant A uwolnienia od więzów pary postępowej (rys. 3.9). Tak należy rzeczywiście postąpić w przypadku pokazanym na rysunku 3.31 a, kiedy suwak obciążony jest dowolną siłą zewnętrzną P2.
Rozważany w zadaniu przypadek jest jednak szczególny, gdyż na krzyżak nie działa żadna siła zewnętrzna. Warunek równowagi sił działających na krzyżak ma zatem postać
R^2+R32=0 (P3.31)
Ponieważ siły R12 i R32 są do siebie prostopadłe, równanie (P3.31) jest spełnione tylko wtedy, gdy R12 = Ó oraz R32 = 0, co oznacza, że uwalniając suwak od więzów należy przyłożyć wyłącznie momenty sił, co zostało pokazane na rysunku 3.31 b.
a)
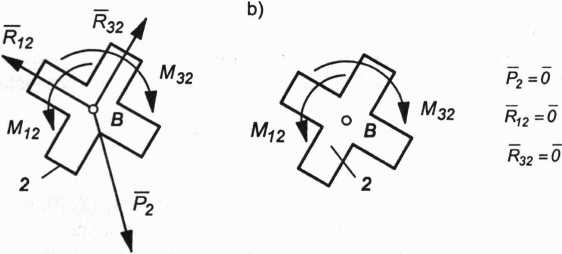
Rys. 3.31. Układ sił działających na krzyżak 2: a) przypadek obciążenia suwaka siłą zewnętrzną; b) suwak nieobciąźony żadną siłą zewnętrzną
148
Wyszukiwarka
Podobne podstrony:
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (68) Ponieważ suwak 3 obraca się razem z jarzmem, to jego prędkość kątowa jest równa pręd
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (14) Odbieranie bryle stopni swobody polega na narzuceniu więzów w określonych kierunkach
23 luty 07 (50) Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ru
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
więcej podobnych podstron