23 luty 07 (129)
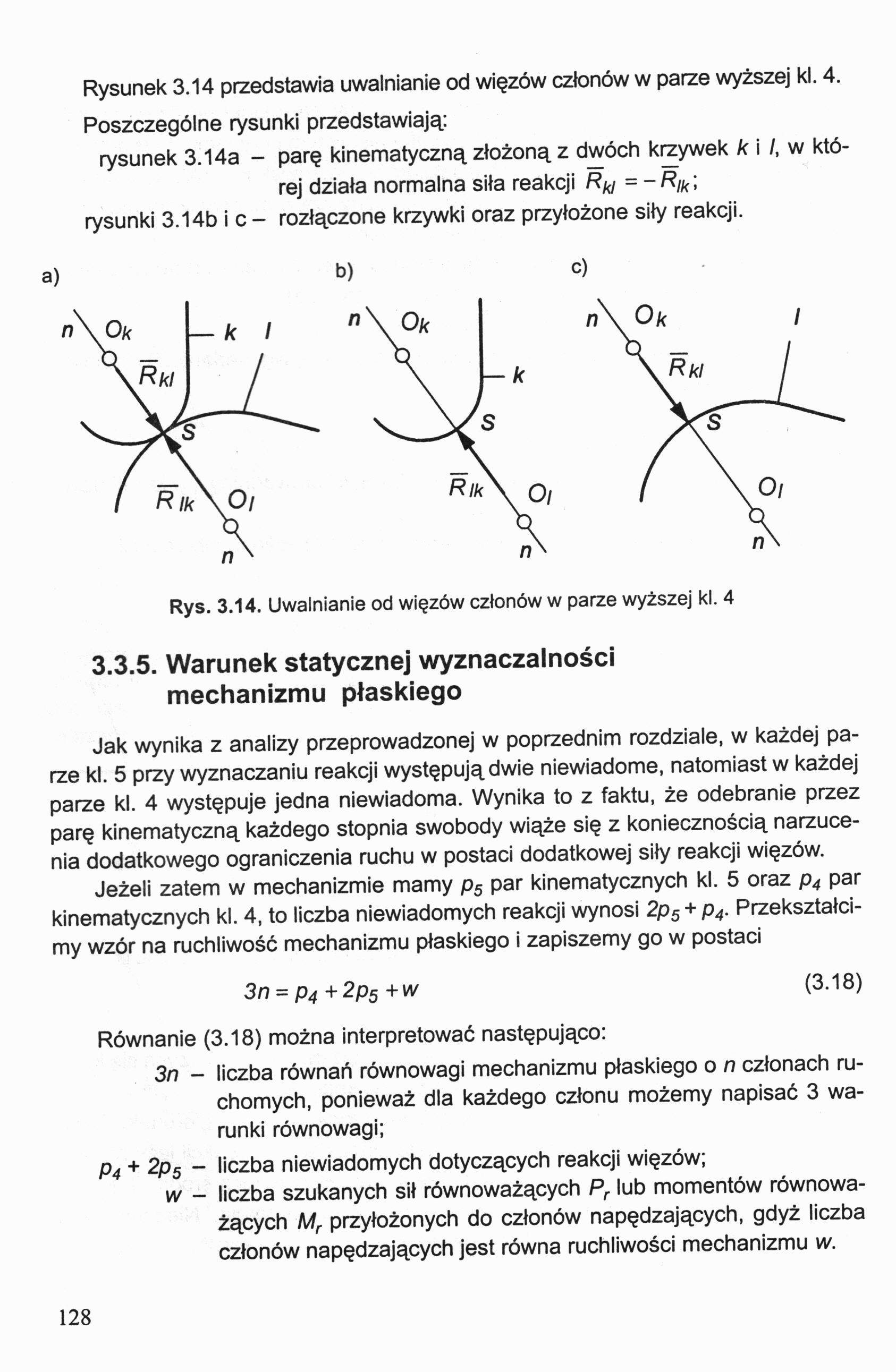
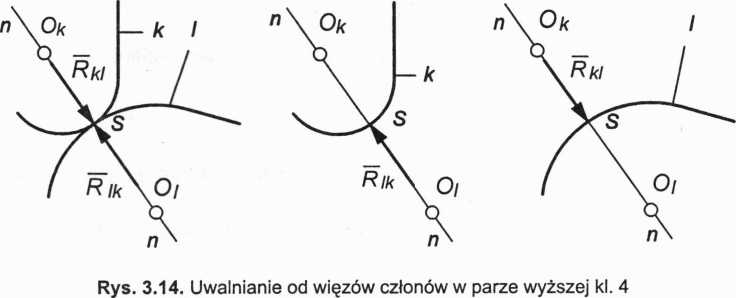
Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszczególne rysunki przedstawiają:
rysunek 3.14a - parę kinematyczną złożoną z dwóch krzywek k i /, w której działa normalna siła reakcji Rki = -R/k', rysunki 3.14b i c - rozłączone krzywki oraz przyłożone siły reakcji.
a) b) c)
3.3.5. Warunek statycznej wyznaczalności mechanizmu płaskiego
Jak wynika z analizy przeprowadzonej w poprzednim rozdziale, w każdej parze kl. 5 przy wyznaczaniu reakcji występują dwie niewiadome, natomiast w każdej parze kl. 4 występuje jedna niewiadoma. Wynika to z faktu, że odebranie przez parę kinematyczną każdego stopnia swobody wiąże się z koniecznością narzucenia dodatkowego ograniczenia ruchu w postaci dodatkowej siły reakcji więzów.
Jeżeli zatem w mechanizmie mamy p5 par kinematycznych kl. 5 oraz p4 par kinematycznych kl. 4, to liczba niewiadomych reakcji wynosi 2p5 + p4. Przekształcimy wzór na ruchliwość mechanizmu płaskiego i zapiszemy go w postaci
3n = p4+2p5+w (3.18)
Równanie (3.18) można interpretować następująco:
3n - liczba równań równowagi mechanizmu płaskiego o n członach ruchomych, ponieważ dla każdego członu możemy napisać 3 warunki równowagi;
p4 + 2ps - liczba niewiadomych dotyczących reakcji więzów;
w - liczba szukanych sił równoważących Pr lub momentów równoważących Mr przyłożonych do członów napędzających, gdyż liczba członów napędzających jest równa ruchliwości mechanizmu w.
128
Wyszukiwarka
Podobne podstrony:
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (141) Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użyteczn
23 luty 07 (143) Równanie (P3.14) zawiera teraz tylko dwie niewiadome oraz R12 oraz RS:3. (P3.16) R^
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (14) Odbieranie bryle stopni swobody polega na narzuceniu więzów w określonych kierunkach
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
więcej podobnych podstron