23 luty 07 (141)
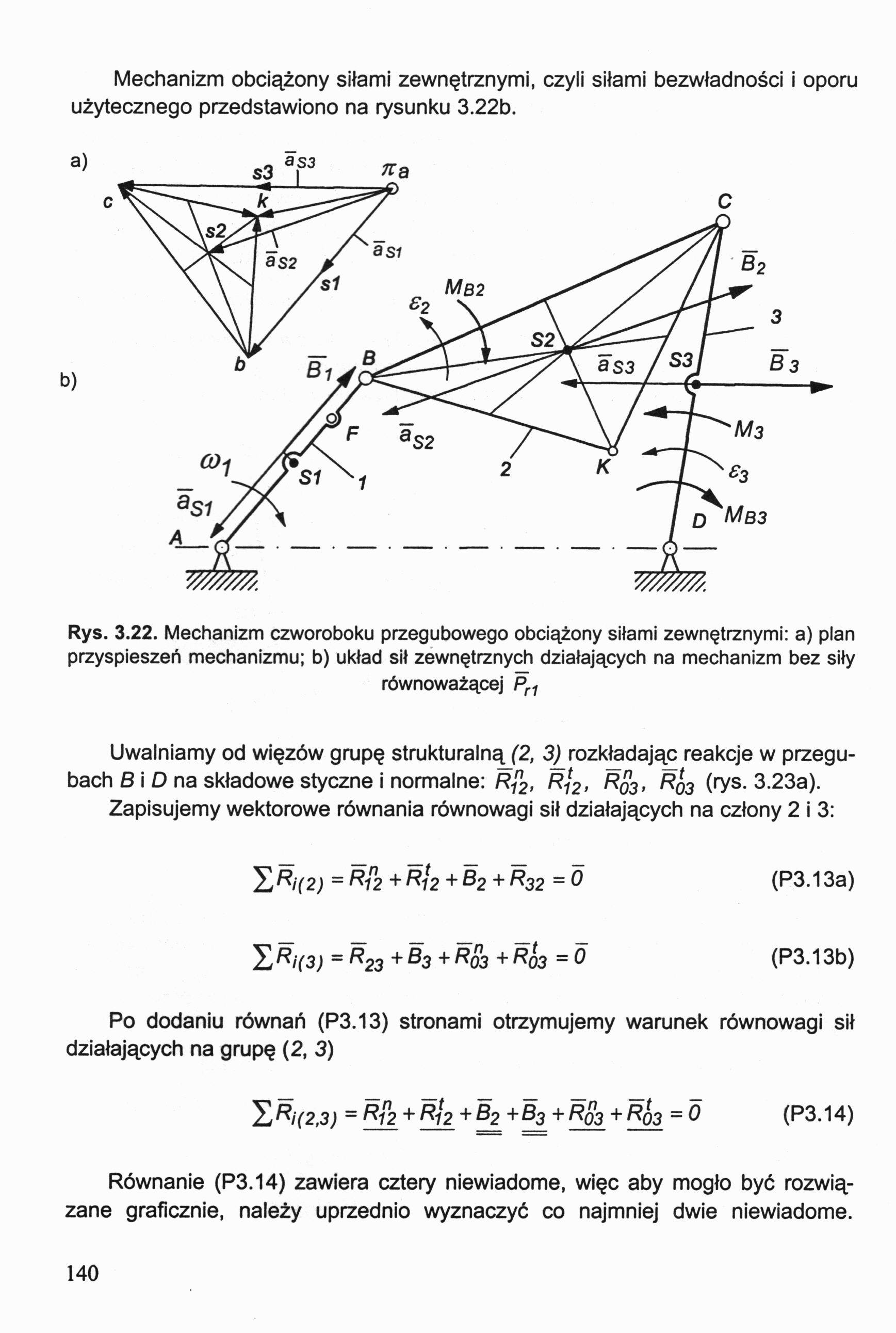
Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użytecznego przedstawiono na rysunku 3.22b.
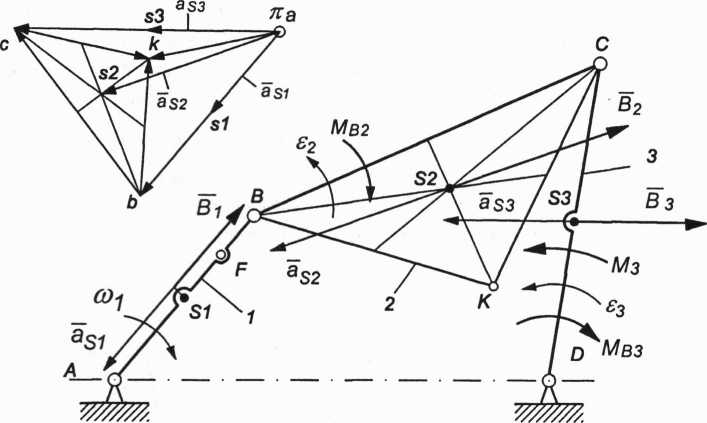
Rys. 3.22. Mechanizm czworoboku przegubowego obciążony siłami zewnętrznymi: a) plan przyspieszeń mechanizmu; b) układ sił zewnętrznych działających na mechanizm bez siły
równoważącej Pr1
Uwalniamy od więzów grupę strukturalną (2, 3) rozkładając reakcje w przegubach B i D na składowe styczne i normalne; Rf.r\2, R03. R03 (rys. 3.23a). Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3:
Yj^i(2) ~Rl2 +Rl2 + &2 +R32 = 0 (P3.13a)
1 R«3,)=R23+B3+ Ro3 +Ro3=0 (P3.13b)
Po dodaniu równań (P3.13) stronami otrzymujemy warunek równowagi sił działających na grupę (2, 3)
YjRi(2,3) = R?2 + Rl2 + &2 +&3 + Rq3 + Rp3 = 0 (P3.14)
Równanie (P3.14) zawiera cztery niewiadome, więc aby mogło być rozwiązane graficznie, należy uprzednio wyznaczyć co najmniej dwie niewiadome.
140
Wyszukiwarka
Podobne podstrony:
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
23 luty 07 (79) Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający się z n wekto
23 luty 07 (9) 1. STRUKTURA MECHANIZMÓW1.1. POJĘCIA PODSTAWOWE1.1.1. &
24 luty 07 (19) Interpretację geometryczną WST w parze kinematycznej płaskiej ki. 5 z dociskiem dwus
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (113) 3. DYNAMIKA MECHANIZMÓW I MASZYN3.1. CELI ZAKRESANALIZY DYNAMICZNEJ MECHANIZMÓW Dyn
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
więcej podobnych podstron