23 luty 07 (136)
Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g.
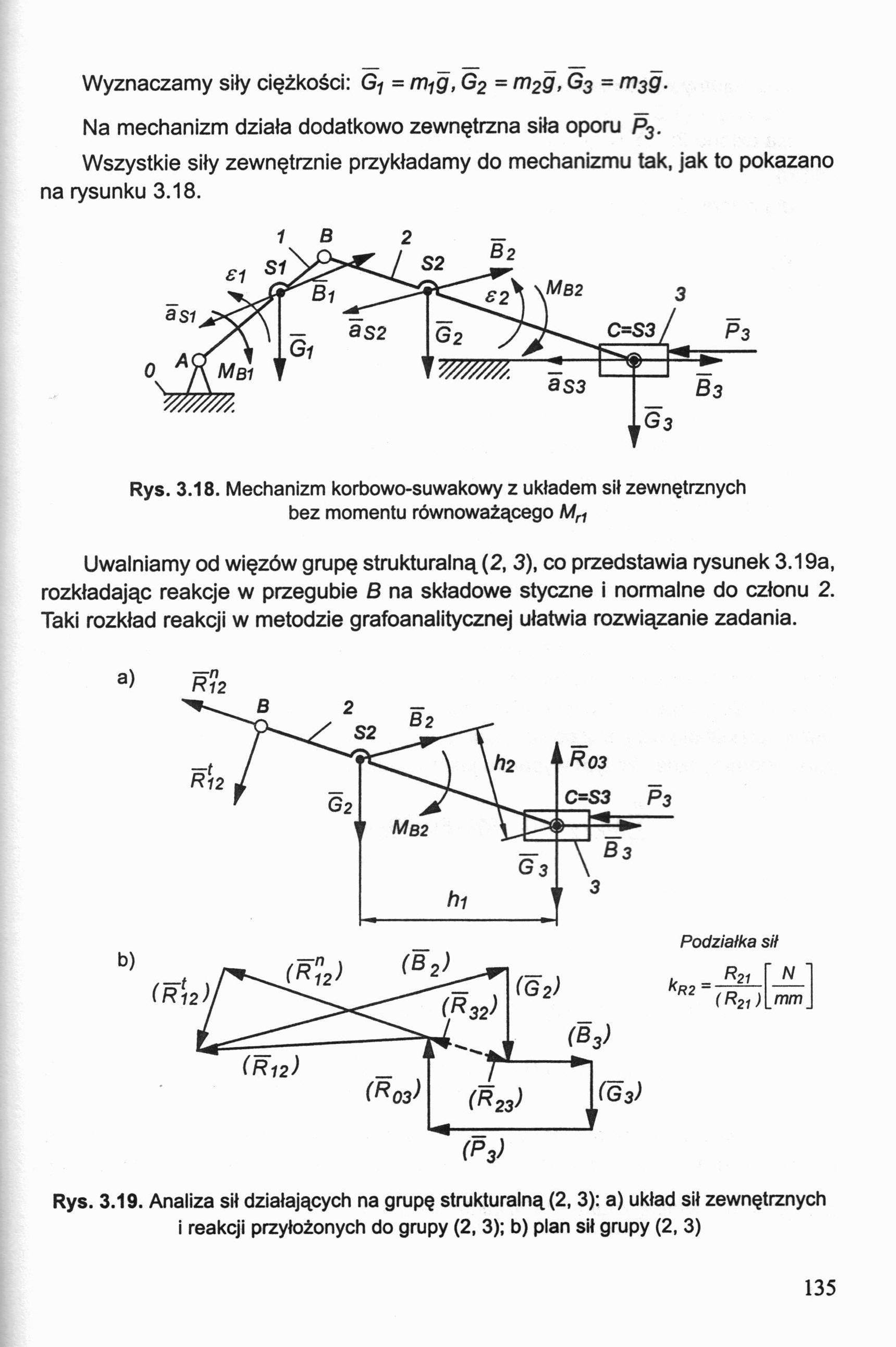
Na mechanizm działa dodatkowo zewnętrzna siła oporu P3.
Wszystkie siły zewnętrznie przykładamy do mechanizmu tak, jak to pokazano na rysunku 3.18.
Rys. 3.18. Mechanizm korbowo-suwakowy z układem sił zewnętrznych bez momentu równoważącego Mr1
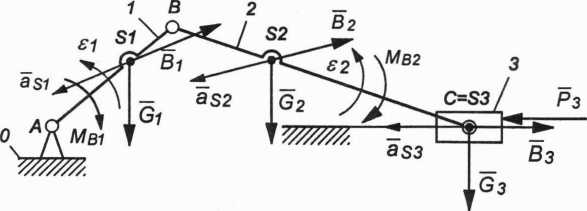
Uwalniamy od więzów grupę strukturalną (2, 3), co przedstawia rysunek 3.19a, rozkładając reakcje w przegubie B na składowe styczne i normalne do członu 2. Taki rozkład reakcji w metodzie grafoanalitycznej ułatwia rozwiązanie zadania.
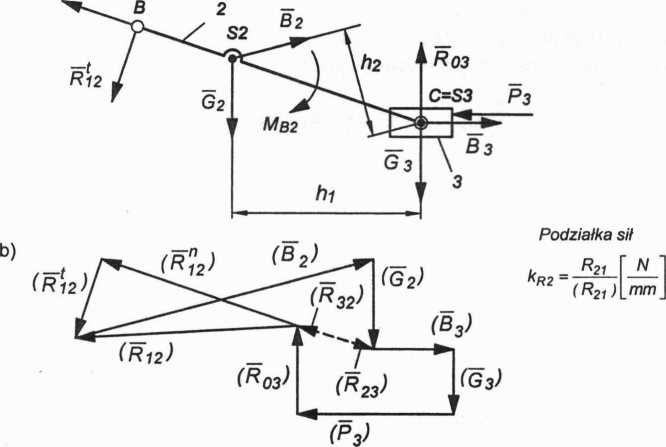
Rys. 3.19. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewnętrznych i reakcji przyłożonych do grupy (2, 3); b) plan sił grupy (2, 3)
135
Wyszukiwarka
Podobne podstrony:
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (70) Przyspieszenie względne (aDB) można wyznaczyć również na podstawie znajomości długoś
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
28 luty 09 (65) Wyznaczenie siły pionowej nad stropem parteru: - szerokość pasma s
więcej podobnych podstron