23 luty 07 (49)

1 B
człon w ruchu płaskim
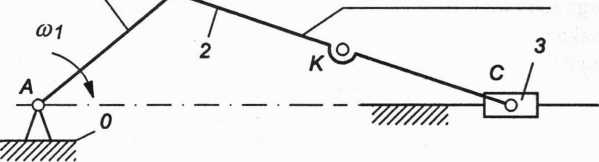
W celu wyznaczenia chwilowego środka obrotu członu 2 rysujemy prostą prostopadłą do wektora prędkości punktu B w jego początku oraz analogicznie rysujemy prostą prostopadłą do wektora prędkości punktu C. Na przecięciu obydwu prostych znajdujemy punkt O stanowiący chwilowy środek obrotu członu 2.

Rys. 2.10. Wyznaczanie prędkości punktów łącznika mechanizmu korbowo-suwakowego metodą chwilowego środka obrotu
Ruch suwaka względem ruchomej prowadnicy
Szczególnym przypadkiem ruchu członu na płaszczyźnie jest ruch suwaka po ruchomej prowadnicy.
Przypadek takiego ruchu zostanie przedstawiony na przykładzie złożonego mechanizmu dźwigniowego, w którym suwak 4 porusza się względem ruchomej krzywoliniowej prowadnicy 2, rysunek 2.11.
47
Wyszukiwarka
Podobne podstrony:
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (13) Człon swobodny posiada na płaszczyźnie trzy stopnie swobody: dwa przesunięcia xA, yA
23 luty 07 (50) Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ru
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (70) Przyspieszenie względne (aDB) można wyznaczyć również na podstawie znajomości długoś
s 193 7.3. Przyspieszenie punktów ciała w ruchu płaskim Znaleźć położenie chwilowego środka przyspie
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (138) Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunko
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
23 luty 07 (148) Równanie równowagi sił działających na człon napędzający ma postać R21 + Bi + Rqi +
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
więcej podobnych podstron