23 luty 07 (138)
Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunkowe wszystkich znanych sił i zapisujemy równanie (P3.7) w postaci
( Rfy ) + ( Rl2 ) + ( &2 ) + ( ^2 ) + (&3 ) + ( G3 )+( P3 )+(Rq3) — 0 (P3.8)
Rysowanie wieloboku sił rozpoczynamy od pierwszej znanej całkowicie siły, w tym wypadku jest to siła (Rj2), a kończymy na ostatniej znanej całkowicie sile, w tym wypadku jest to siła (P3 ), patrz rysunek 3.19b.
W celu zamknięcia wieloboku wektorowego opisanego równaniem (P3.7) rysujemy z początku wektora (f?/2) kierunek reakcji (R?2) a z końca wektora ostatniej znanej siły (P3 ) kierunek reakcji (Rq3 ). Te dwa kierunki zamykają wielobok sił dla grupy, pozwalając wyznaczyć nieznane wartości reakcji (R12) • (^03)■
Z wieloboku sił odczytujemy wartości rysunkowe (R12 ) = (P12 ) + (^12 ) oraz (Rq3 ), a następnie obliczamy wartości: R12 = (R12) • kR1, R03 = R33 = (R33 )-kR1.
Na podstawie równania (P3.2) z planu sił odczytujemy reakcję (R32), a na podstawie równania (P3.3) reakcję (R23)- Jak widać na planie sił (R23) + (R32) = 0-
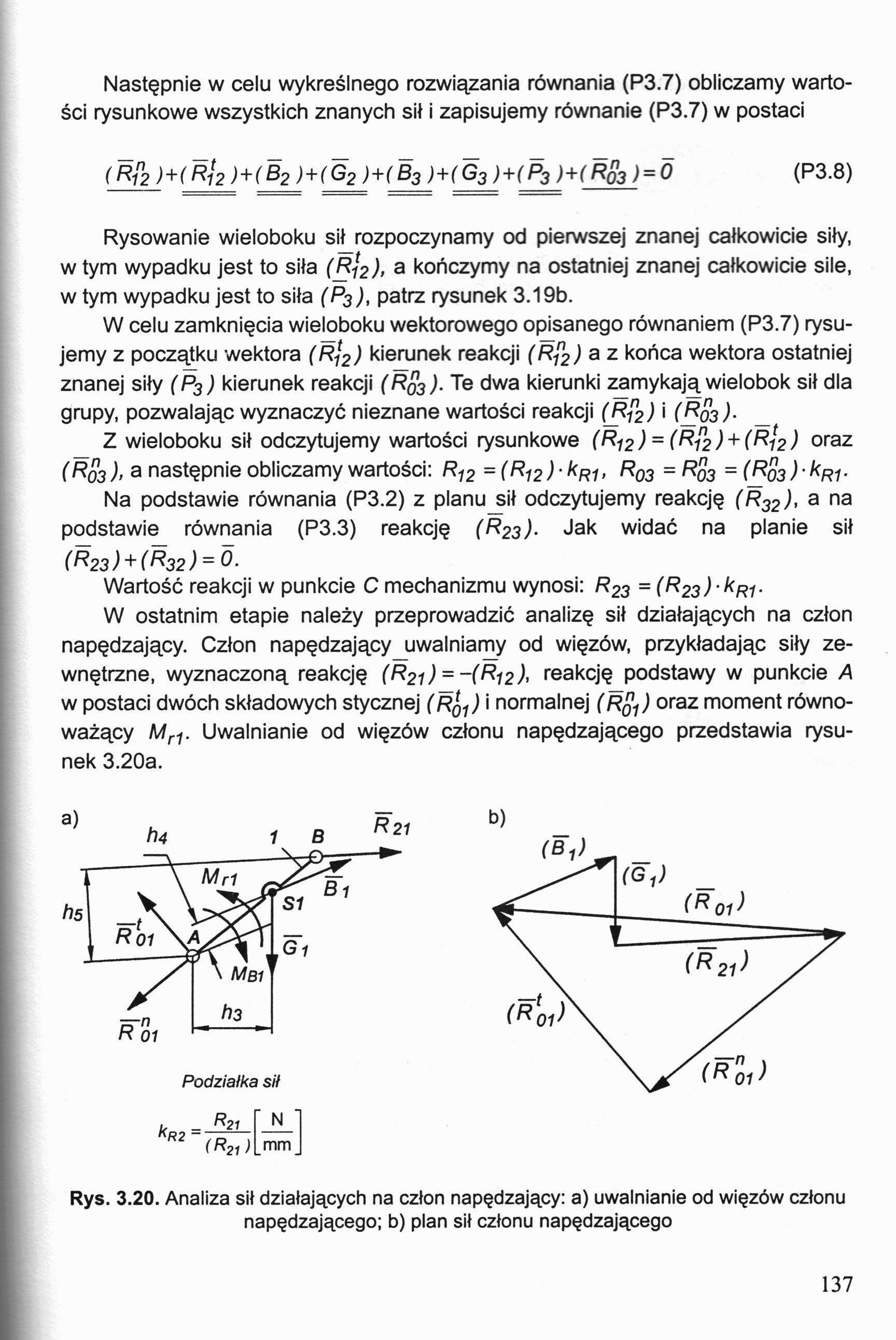
Wartość reakcji w punkcie C mechanizmu wynosi: R23 =(R23)'kRi-W ostatnim etapie należy przeprowadzić analizę sił działających na człon napędzający. Człon napędzający uwalniamy od więzów, przykładając siły zewnętrzne, wyznaczoną reakcję (R21) = -(R12), reakcję podstawy w punkcie A w postaci dwóch składowych stycznej (Rf01) i normalnej (R^) oraz moment równoważący Mr1. Uwalnianie od więzów członu napędzającego przedstawia rysunek 3.20a.
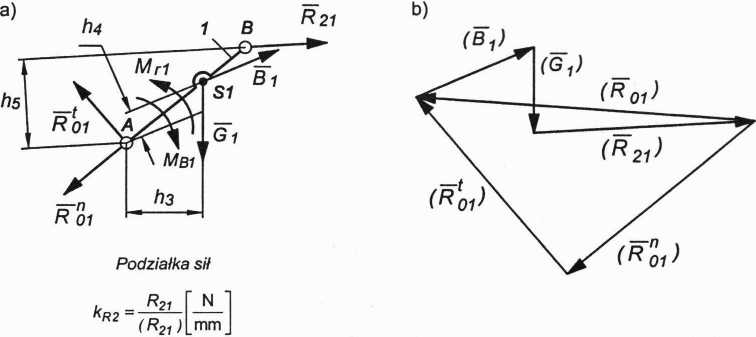
Rys. 3.20. Analiza sił działających na człon napędzający: a) uwalnianie od więzów członu napędzającego; b) plan sił członu napędzającego
137
Wyszukiwarka
Podobne podstrony:
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (39) Stosowane są również metody grafoanalityczne, które w zasadzie można zaliczyć do met
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (75) Obecnie ma mniejsze znaczenie jako metoda graficznego rozwiązywania problemów kinema
23 luty 07 (83) W celu obliczenia przyspieszenia kątowego różniczkujemy (P2.47) względem czasu A .2
więcej podobnych podstron