23 luty 07 (57)
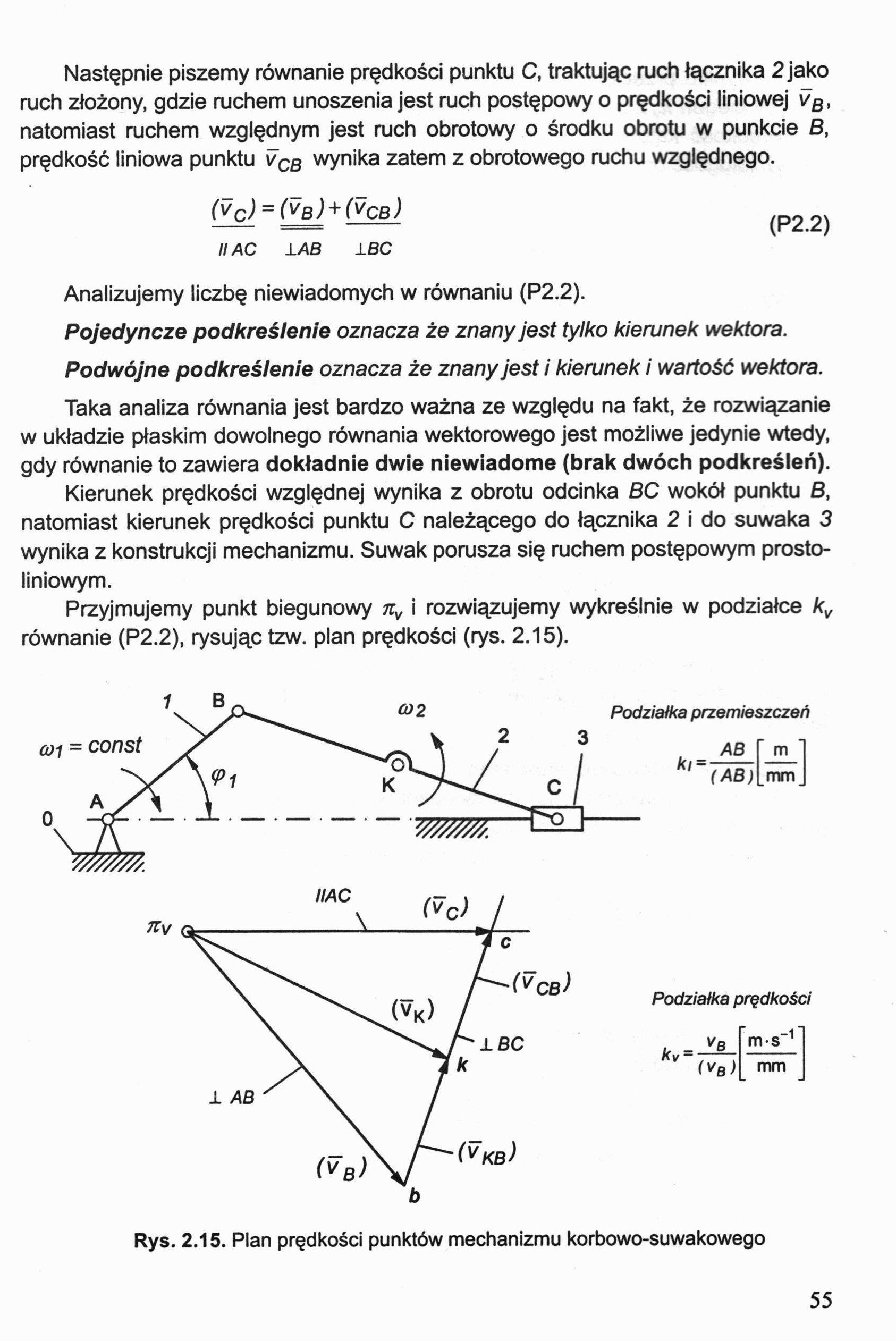
Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch złożony, gdzie ruchem unoszenia jest ruch postępowy o prędkości liniowej vB, natomiast ruchem względnym jest ruch obrotowy o środku obrotu w punkcie B, prędkość liniowa punktu vCB wynika zatem z obrotowego ruchu względnego.
(vc) = (vb) + (vcb) ^p22j
II AC 1AB 1BC
Analizujemy liczbę niewiadomych w równaniu (P2.2).
Pojedyncze podkreślenie oznacza że znany jest tylko kierunek wektora.
Podwójne podkreślenie oznacza że znany jest i kierunek i wartość wektora.
Taka analiza równania jest bardzo ważna ze względu na fakt, że rozwiązanie w układzie płaskim dowolnego równania wektorowego jest możliwe jedynie wtedy, gdy równanie to zawiera dokładnie dwie niewiadome (brak dwóch podkreśleń).
Kierunek prędkości względnej wynika z obrotu odcinka SC wokół punktu 6, natomiast kierunek prędkości punktu C należącego do łącznika 2 i do suwaka 3 wynika z konstrukcji mechanizmu. Suwak porusza się ruchem postępowym prostoliniowym.
Przyjmujemy punkt biegunowy nv i rozwiązujemy wykreślnie w podziałce kv równanie (P2.2), rysując tzw. plan prędkości (rys. 2.15).
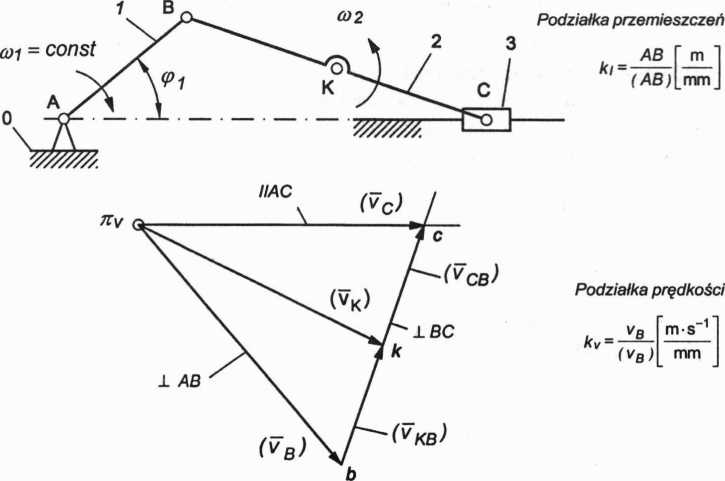
Rys. 2.15. Plan prędkości punktów mechanizmu korbowo-suwakowego
55
Wyszukiwarka
Podobne podstrony:
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (138) Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunko
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (44) W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są
23 luty 07 (84) Przekształcamy układ równań (P2.52) do postaci: If coscpi +l2 cos(p2 -10 = -l3 cosę3
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (90) W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy pierwsze z
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
więcej podobnych podstron