23 luty 07 (61)
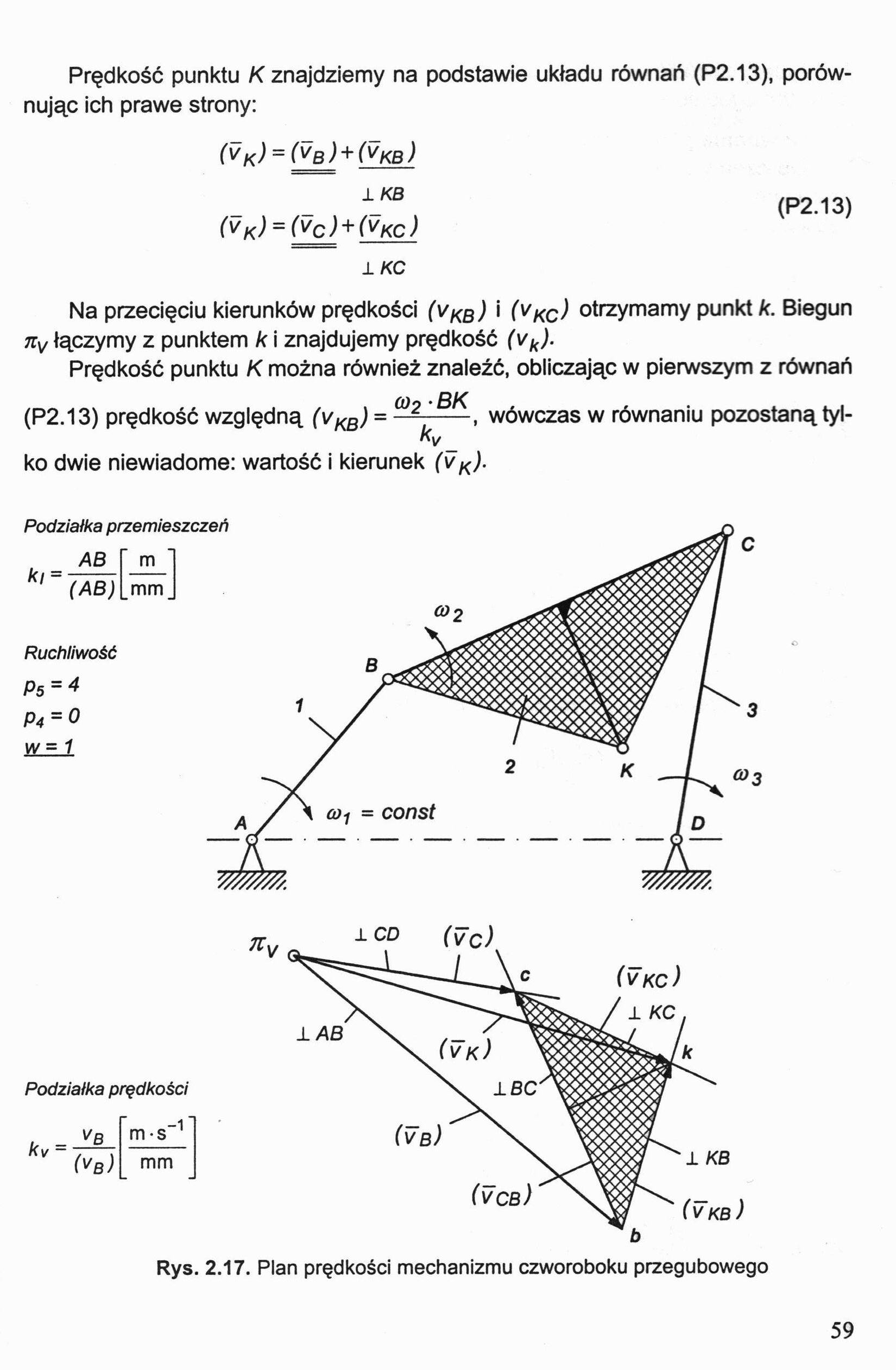
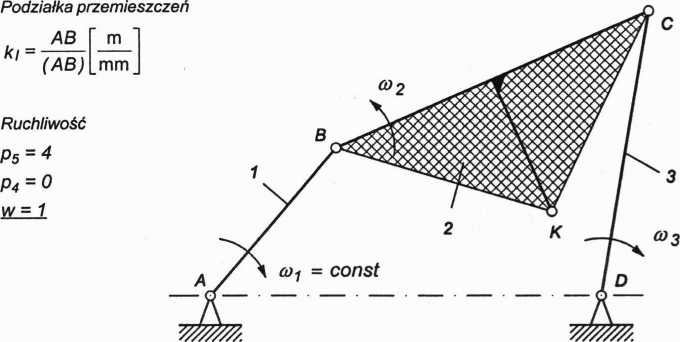
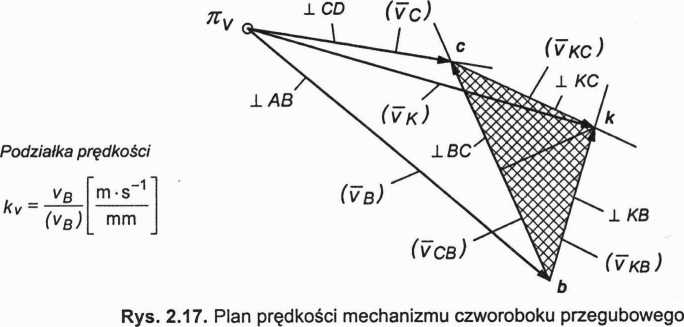
Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich prawe strony:
(vK) = (vb) + (vkb)
(P2.13)
i KB
(vk) = (vc) + (vkc) 1 KC
Na przecięciu kierunków prędkości (vKB) i (vKC) otrzymamy punkt k. Biegun n.y łączymy z punktem k i znajdujemy prędkość (vk).
Prędkość punktu K można również znaleźć, obliczając w pierwszym z równań
wówczas w równaniu pozostaną tyl-
(P2.13) prędkość względną (vKB) = ---,
"V_
ko dwie niewiadome: wartość i kierunek (vK).
59
Wyszukiwarka
Podobne podstrony:
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
23 luty 07 (64) Przyspieszenie punktu K można również znaleźć, obliczając w pierwszym 6 • BK zrównać
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
24 luty 07 (132) Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę
Wprowadzenie i dochodowe efekty zmian cen towarów omawiane na podstawie układu równań J. Słuckiego.
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (66) Łącząc biegun planu przyspieszeń na z punktem przecięcia b2 otrzymamy wartość przysp
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
więcej podobnych podstron