23 luty 07 (48)
Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB oraz przyspieszenie aCB = ÓqB + a^B wynikają z obrotowego ruchu względnego.
Prędkość punktów bryły poruszającej się ruchem płaskim można wyznaczyć korzystając z pierwszego twierdzenia Eulera.
Twierdzenie 2.2. Dowolne przemieszczenie figury płaskiej w jej płaszczyźnie w czasie At może być dokonane poprzez jej obrót wokół pewnego punktu zwanego skończonym środkiem obrotu. Chwilowy środek obrotu jest granicznym położeniem skończonego środka obrotu przy At -» 0 i punkt ten w danej chwili ma prędkość równą zero.
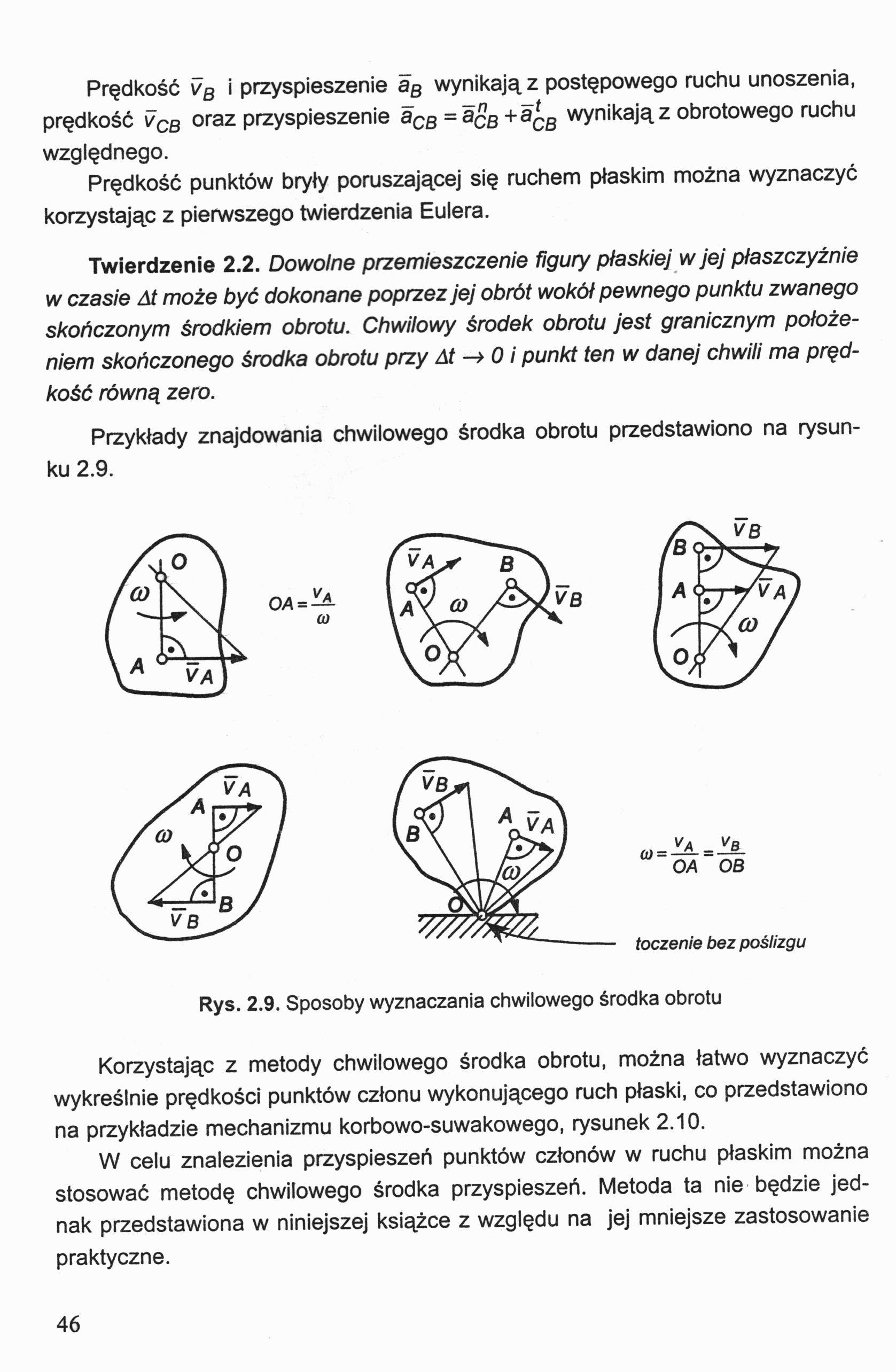
Przykłady znajdowania chwilowego środka obrotu przedstawiono na rysunku 2.9.

Rys. 2.9. Sposoby wyznaczania chwilowego środka obrotu
Korzystając z metody chwilowego środka obrotu, można łatwo wyznaczyć wykreślnie prędkości punktów członu wykonującego ruch płaski, co przedstawiono na przykładzie mechanizmu korbowo-suwakowego, rysunek 2.10.
W celu znalezienia przyspieszeń punktów członów w ruchu płaskim można stosować metodę chwilowego środka przyspieszeń. Metoda ta nie będzie jednak przedstawiona w niniejszej książce z względu na jej mniejsze zastosowanie praktyczne.
46
Wyszukiwarka
Podobne podstrony:
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
23 luty 07 (83) W celu obliczenia przyspieszenia kątowego różniczkujemy (P2.47) względem czasu A .2
23 luty 07 (86) W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.60) cofli cos(pi
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (44) W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
23 luty 07 (56) Kolejność postępowania w metodzie planów prędkości i przyspieszeń: 1. &n
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (43) Przyspieszenie kątowe: (2.2c) (2.2d) (2.2e) (2-2f) e(t) = (0,0,e(t)), e(t) = ^ = ^-
więcej podobnych podstron