23 luty 07 (42)
W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej, tj. miejsce geometryczne końców wektorów prędkości lub przyspieszeń tej prostej, są liniami do niej równoległymi, jak pokazano na rysunku 2.2.
Ruch obrotowy bryły
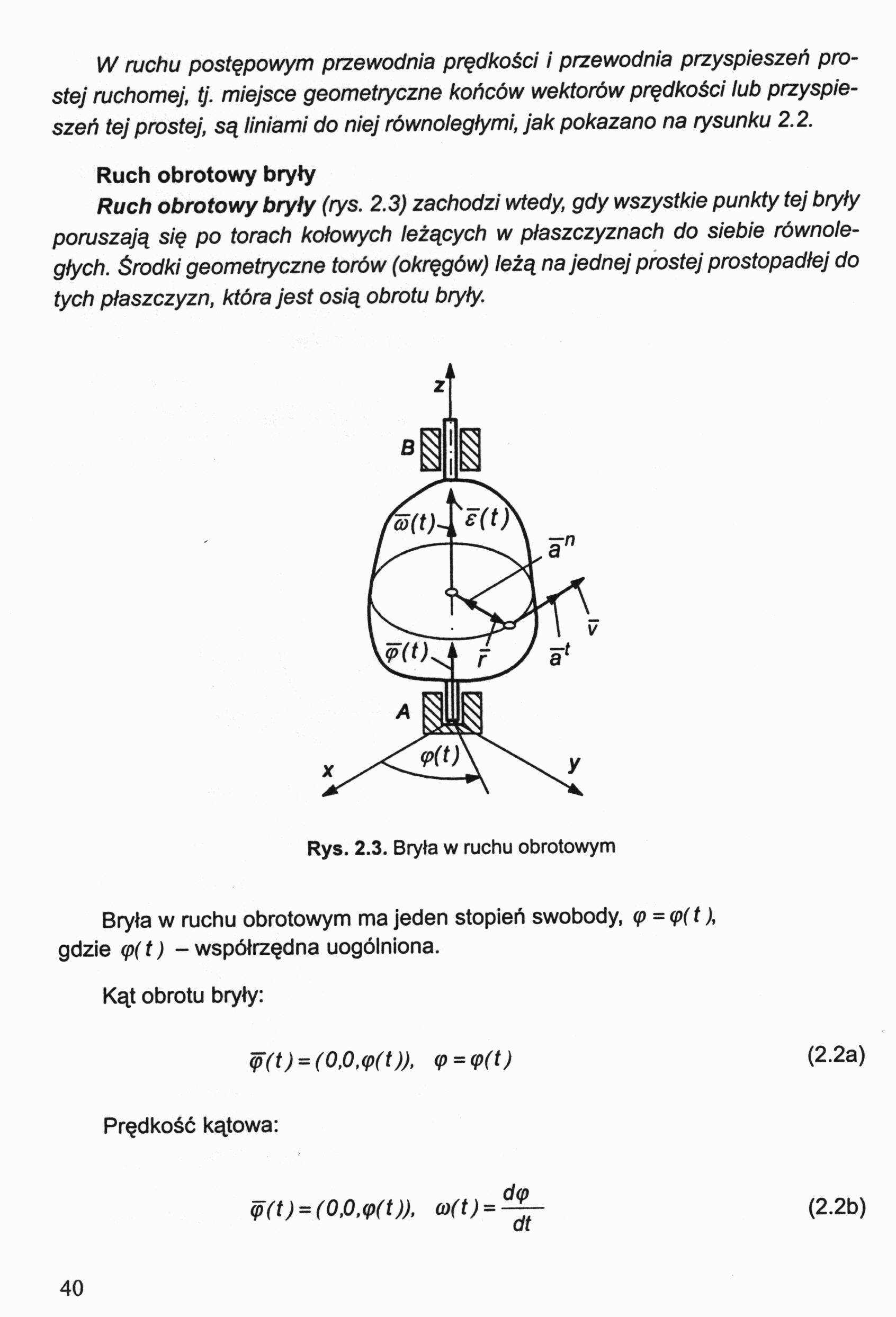
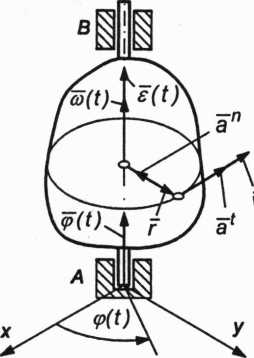
Ruch obrotowy bryły (rys. 2.3) zachodzi wtedy, gdy wszystkie punkty tej bryły poruszają się po torach kołowych leżących w płaszczyznach do siebie równoległych. Środki geometryczne torów (okręgów) leżą na jednej prostej prostopadłej do tych płaszczyzn, która jest osią obrotu bryły.
z
V
Rys. 2.3. Bryła w ruchu obrotowym
Bryła w ruchu obrotowym ma jeden stopień swobody, <p = ę(t),
gdzie ę(t) - współrzędna uogólniona. Kąt obrotu bryły:
(2.2a)
<p(t) = (0,0,ę(t)), (p = (p(t)
Prędkość kątowa:

(2.2b)
40
Wyszukiwarka
Podobne podstrony:
23 luty 07 (44) W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są
23 luty 07 (56) Kolejność postępowania w metodzie planów prędkości i przyspieszeń: 1. &n
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (41) Do opisu postępowego ruchu bryły wystarczy wybrać jeden dowolny punkt należący do br
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
23 luty 07 (47) Przewodnia przyspieszeń obrotowego ruchu względnego Składanie przyspieszenia unoszen
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
więcej podobnych podstron