23 luty 07 (99)
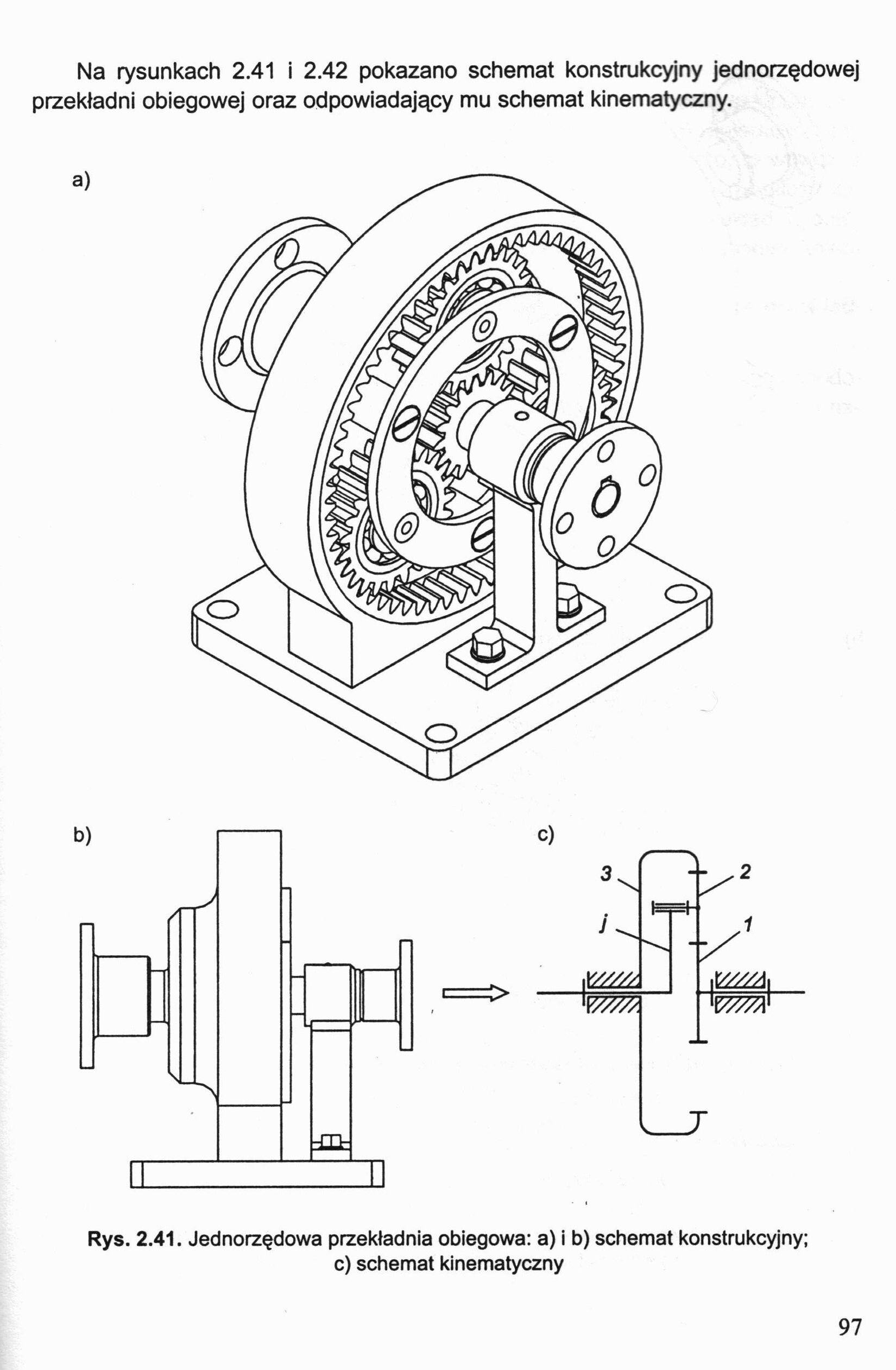
Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obiegowej oraz odpowiadający mu schemat kinematyczny.
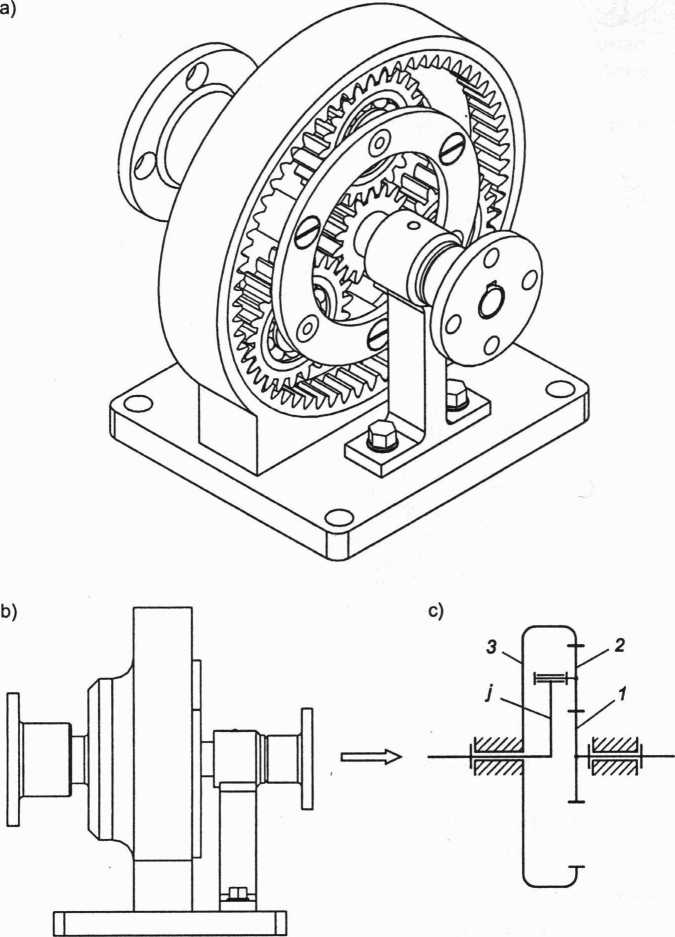
Rys. 2.41. Jednorzędowa przekładnia obiegowa: a) i b) schemat konstrukcyjny;
c) schemat kinematyczny
97
Wyszukiwarka
Podobne podstrony:
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (63) Na przecięciu kierunków przyspieszeń (afKB) i (afKC) otrzymamy punkt k. Biegun na łą
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
więcej podobnych podstron