23 luty 07 (147)
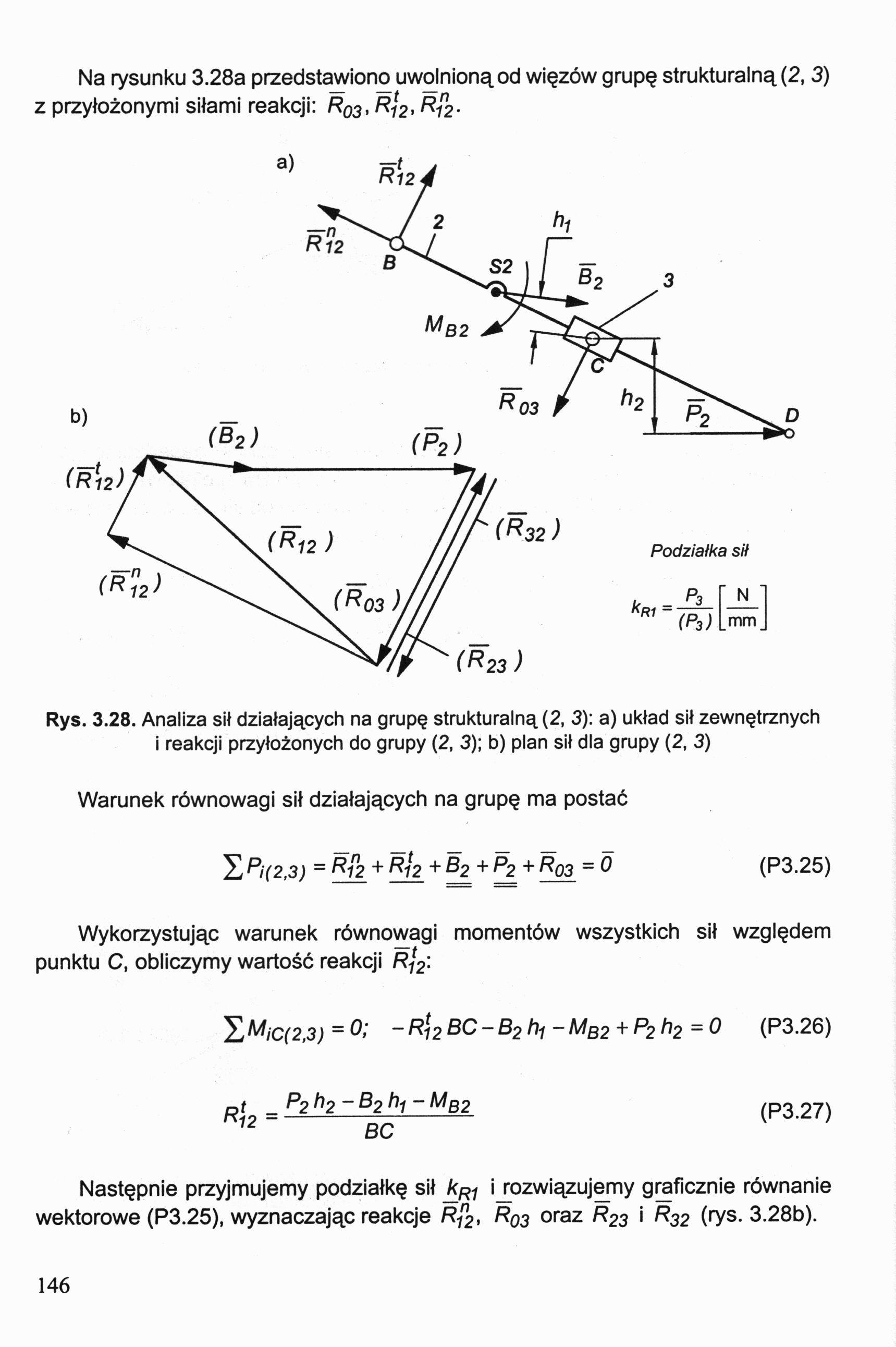
Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przyłożonymi siłami reakcji: R03, R\2< R?2-

Rys. 3.28. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewnętrznych i reakcji przyłożonych do grupy (2, 3); b) plan sił dla grupy (2, 3)
(P3.25)
Warunek równowagi sił działających na grupę ma postać X pi(2,3) - ^2 + ^12_ + B2+P2+ Rq3_ = 0
Wykorzystując warunek równowagi momentów wszystkich sił względem punktu C, obliczymy wartość reakcji r/2:
YjMiC(2,3)~0< -Ri2BC-B2hi -Mb2^P2^2=^ (P3.26)
t _P2h2~ B2 h1 - MB2
nr -
'12
BC
(P3.27)
Następnie przyjmujemy podziałkę sił kRł i_rozwiązujemy graficznie równanie wektorowe (P3.25), wyznaczając reakcje R"2, R03 oraz R23 i R32 (rys. 3.28b).
146
Wyszukiwarka
Podobne podstrony:
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
23 luty 07 (63) Na przecięciu kierunków przyspieszeń (afKB) i (afKC) otrzymamy punkt k. Biegun na łą
23 luty 07 (150) Uwalniamy teraz od więzów grupę strukturalną (2, 3) (rys. 3.32a). a) / b) 3 C *03 R
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (141) Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użyteczn
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
Image353 Na rysunku 4.405 przedstawiono układ spełniający funkcję enkodera priorytetowego 147, zbudo
IMG 96 23. Na rysunku 1.48 przedstawiono dwa typy tkanki mięśniowej. Rys. 1.48 a) Wypełnij tabelę, w
23 1.2. ABSTRAKCYJNE TYPY DANYCHPodsumowanie Na rysunku 1.4 przedstawiamy schemat procesu tworzenia
63124 ZIELONA MATEMATYKA 07 ZBIÓR JEST GRUPĄ ELEMENTÓW, KTÓRE MAJĄ JAKĄŚ WSPÓLNĄ CECHĘ. Na rysunku
więcej podobnych podstron