23 luty 07 (87)

Rozwiązanie
Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego punktu K
rK = !1 + U (P2.68)
Następnie wyznaczymy współrzędne wektora rK:
(P2.69)
rKx = I-] coscpt +l4 cos(ę2 +a) rKy = I-i sin (pi +I4 sin(ę2 +a)
Zależności (P2.69) są parametrycznymi równaniami toru punktu K, czyli równaniami hodografu wektora promienia wodzącego rK.
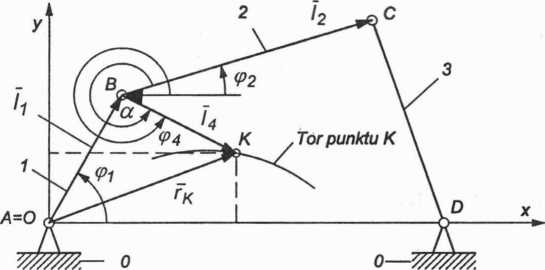
Rys. 2.30. Czworobok przegubowy z oznaczonym punktem K płaszczyzny łącznikowej
Następnie różniczkujemy równania (P2.69) i znajdujemy współrzędne wektora prędkości punktu K:
vKx
dri
Kx
dt
= -li(Oi sincpi -14(02 sin((p2 +a)
VKy =
drKy
dt
(P2.70)
=! 1(1)1 cosq>i +l4(o2 cos((p2 +a)
Zależności (P2.70) są parametrycznymi równaniami hodografu prędkości vK. Wartość wektora prędkości punktu K określimy z zależności
vK=yKx + v2Ky (P2.71)
85
Wyszukiwarka
Podobne podstrony:
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
23 luty 07 (9) 1. STRUKTURA MECHANIZMÓW1.1. POJĘCIA PODSTAWOWE1.1.1. &
24 luty 07 (88) lecz na podstawie (P3.162) mamy 2^ł _ ^ xA a stąd oraz xD _ d xA a’ (P3.164) W celu
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
23 luty 07 (92) Etap 2 Analiza mechanizmu korbowo-suwakowego opisanego wielobokiem wektorowym (P2.92
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (138) Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunko
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (27) Grupę strukturalną definiuje się w sposób umowny na podstawie liczby członów i par o
więcej podobnych podstron