24 luty 07 (88)
lecz na podstawie (P3.162) mamy 2^ł _ ^
xA a
stąd
oraz
xD _ d xA a’
(P3.164)
W celu obliczenia zastępczego współczynnika tłumienia cA porównujemy moce chwilowe sił tłumienia TA i Tg w tłumikach zamocowanych w punktach A i 6:
(P3.165)
ta*a = tb*b
CA*A = CB*B
stąd
CA ~ CB
( • A2 K*A
= cB
(P3.165a)
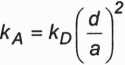
Przykład 3.28
Dany jest rysunek konstrukcyjny układu napędowego: silnik - przekładnia pasowa - narzędzie robocze (piła tarczowa) (rys. 3.101). Należy zbudować model fizyczny układu napędowego oraz przeprowadzić redukcję mas i sił na wał silnika.
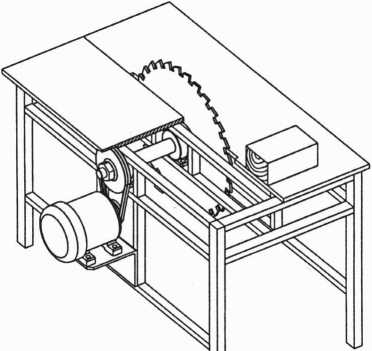
Rys. 3.101. Układ napędowy: silnik, przekładnia, narzędzie robocze
238
Wyszukiwarka
Podobne podstrony:
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (46) Sprawność przekładni obiegowej zależy od kierunku przepływu energii oraz od wartości
24 luty 07 (132) Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę
24 luty 07 (113) Na podstawie planu prędkości otrzymamy: VS1 = ai ■ ias1 ~ VI lAS1 VS2 =(01 h =<
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
24 luty 07 (52) Na podstawie (3.66) i (3.67) mamy: n n
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (92) Obliczamy zredukowany moment sił na wał silnika: Mzri -(Oi =Ms-a>i + Ptf ■ vtt (P
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (108) Uwaga. Ponieważ całkowite przełożenie może być dodatnie lub ujemne w równaniu na Mz
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (110) Obliczenie przyśpieszenia kątowego wału silnika (es(t) = e-i(t)) £t = ~~e T Jzrs (P
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
więcej podobnych podstron