24 luty 07 (132)
Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę doboru koła zamachowego stosujemy dla przypadku:
(P3.278)
Mzr — Mzr(cp,co,t) — Mzrc((p,(o,t) Mzrb((p,co,t), Jzr^JzrtW)
Do obliczeń wykorzystamy algorytm obliczeń numerycznych przedstawiony na rysunku 3.118.
W wyniku obliczeń numerycznych otrzymujemy przebieg prędkości członu redukcji w cyklu ruchu ustalonego co = o)(ę).
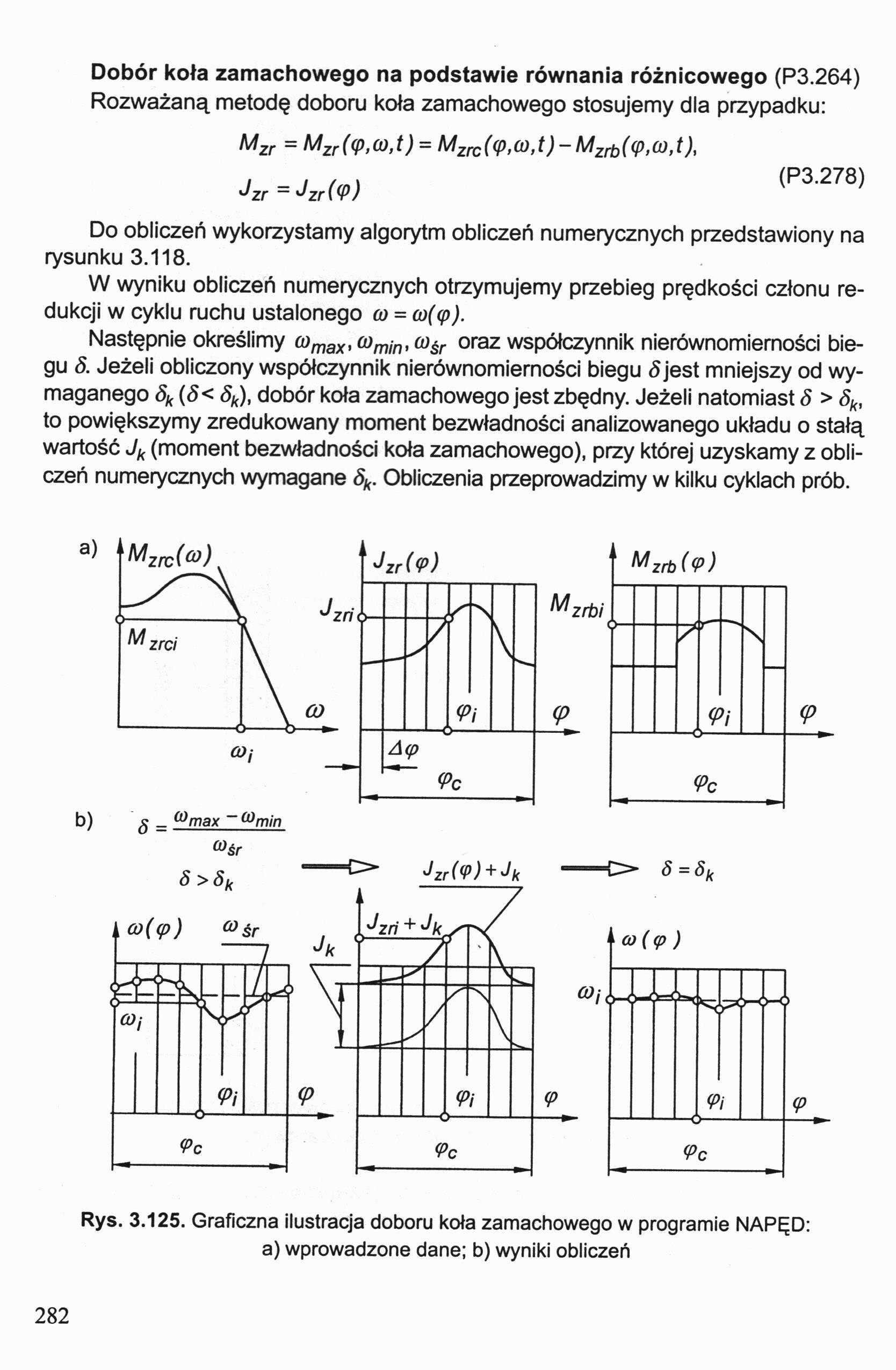
Następnie określimy comax, comin, cośr oraz współczynnik nierównomierności biegu <5. Jeżeli obliczony współczynnik nierównomierności biegu 8 jest mniejszy od wymaganego 8k (<5< 8k), dobór koła zamachowego jest zbędny. Jeżeli natomiast 8 > 8k, to powiększymy zredukowany moment bezwładności analizowanego układu o stałą wartość Jk (moment bezwładności koła zamachowego), przy której uzyskamy z obliczeń numerycznych wymagane 8k. Obliczenia przeprowadzimy w kilku cyklach prób.
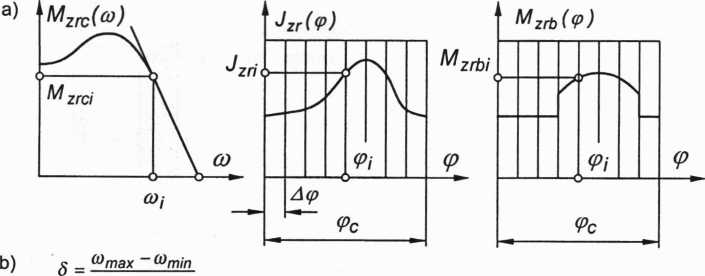
Rys. 3.125. Graficzna ilustracja doboru koła zamachowego w programie NAPĘD: a) wprowadzone dane; b) wyniki obliczeń
282
Wyszukiwarka
Podobne podstrony:
23 luty 07 (61) Prędkość punktu K znajdziemy na podstawie układu równań (P2.13), porównując ich praw
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (108) Uwaga. Ponieważ całkowite przełożenie może być dodatnie lub ujemne w równaniu na Mz
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (113) Na podstawie planu prędkości otrzymamy: VS1 = ai ■ ias1 ~ VI lAS1 VS2 =(01 h =<
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (135) Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mecha
24 luty 07 (13) Na podstawie rysunku 3.42 odczytujemy wartości kątów: (Mr1, co-,) = 0°, (Mb2, W2) =
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (145) Ad c) W przypadku zmian obciążenia silnika w bardzo szerokich granicach należy doda
24 luty 07 (18) Ri RktT oznaczają w przypadku występowania tarcia ruchowego reakcje całkowite, jakim
24 luty 07 (19) Interpretację geometryczną WST w parze kinematycznej płaskiej ki. 5 z dociskiem dwus
więcej podobnych podstron