24 luty 07 (135)
Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mechaniczne. Na szczególną uwagę zasługują charakterystyki silnika napędowego i charakterystyki obciążenia maszyny roboczej (członu roboczego), ponieważ decydują o parametrach ruchu układu napędowego.
Charakterystyka mechaniczna urządzenia podaje zależność między siłą lub momentem sił na jego członie wejściowym lub wyjściowym a parametrami kinematycznymi tego członu (przemieszczeniem, prędkością, przyspieszeniem) oraz czasem, co możemy zapisać w postaci zależności: F = F(s,v,a,t) lub M = M(ę,a),e,t). Inny rodzaj charakterystyki mechanicznej podaje zależność mocy w funkcji parametrów kinematycznych i czasu, tj. N = N(s,v,a,t), N = N(cp,co,e,t).
Najczęściej charakterystyki mechaniczne przedstawiane są w postaci wykresu, gdzie zmienną niezależną jest przemieszczenie liniowe s, kątowe (p oraz prędkość liniowa v lub kątowa co. Przykładowe charakterystyki mechaniczne silników napędowych przedstawia rysunek 3.127.
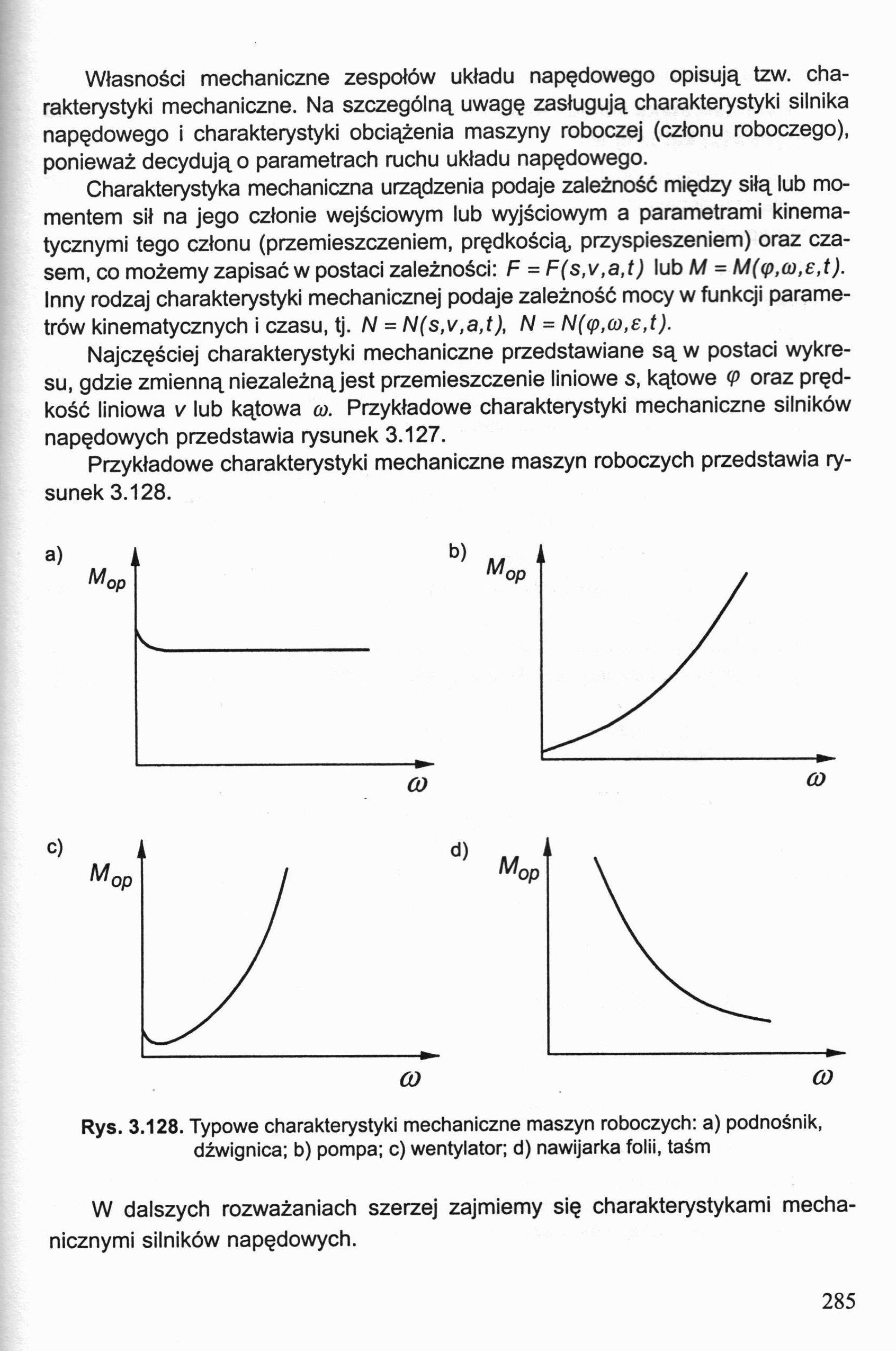
Przykładowe charakterystyki mechaniczne maszyn roboczych przedstawia rysunek 3.128.
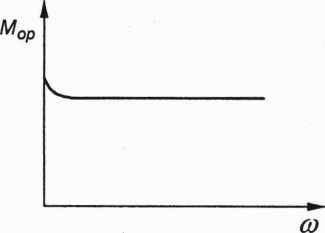
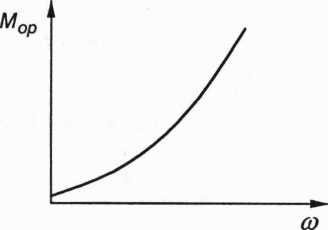
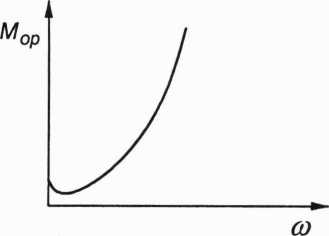
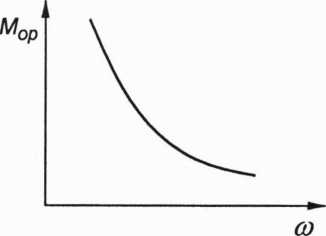
Rys. 3.128. Typowe charakterystyki mechaniczne maszyn roboczych: a) podnośnik, dźwignica; b) pompa; c) wentylator; d) nawijarka folii, taśm
W dalszych rozważaniach szerzej zajmiemy się charakterystykami mechanicznymi silników napędowych.
285
Wyszukiwarka
Podobne podstrony:
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (41) Sprawność mechanizmu wynosi ri = ^=/3"C =1, gdyż
24 luty 07 (50) Do każdej z mas układu przyłożono siłę bezwładności B; o składowych normalnej B-1 =
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
23 luty 07 (135) Grafoanalityczna metoda wyznaczania reakcji dynamicznych w parach kinematycznych wy
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
więcej podobnych podstron