24 luty 07 (142)
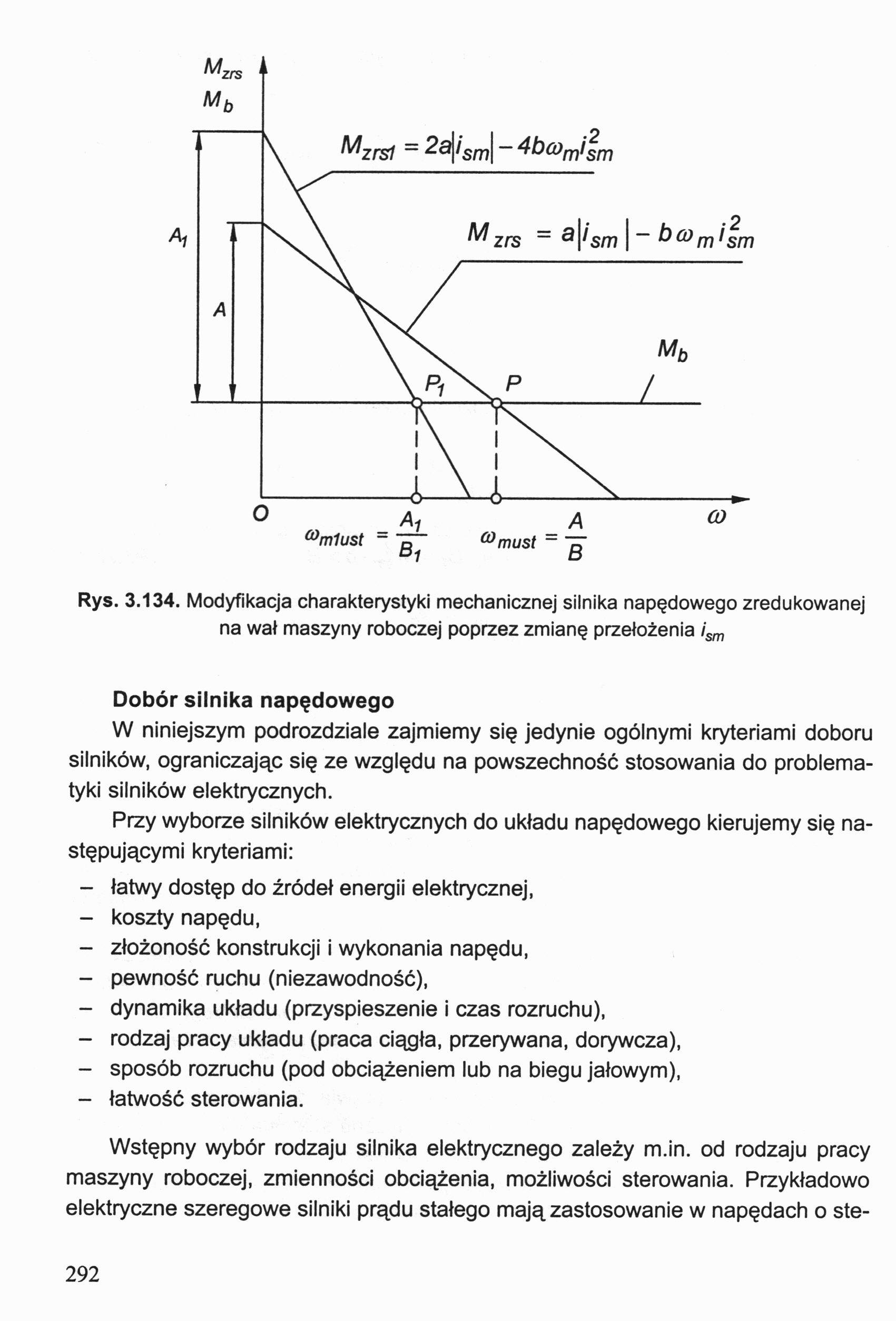

Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowanej na wał maszyny roboczej poprzez zmianę przełożenia ism
Dobór silnika napędowego
W niniejszym podrozdziale zajmiemy się jedynie ogólnymi kryteriami doboru silników, ograniczając się ze względu na powszechność stosowania do problematyki silników elektrycznych.
Przy wyborze silników elektrycznych do układu napędowego kierujemy się następującymi kryteriami:
- łatwy dostęp do źródeł energii elektrycznej,
- koszty napędu,
- złożoność konstrukcji i wykonania napędu,
- pewność ruchu (niezawodność),
- dynamika układu (przyspieszenie i czas rozruchu),
- rodzaj pracy układu (praca ciągła, przerywana, dorywcza),
- sposób rozruchu (pod obciążeniem lub na biegu jałowym),
- łatwość sterowania.
Wstępny wybór rodzaju silnika elektrycznego zależy m.in. od rodzaju pracy maszyny roboczej, zmienności obciążenia, możliwości sterowania. Przykładowo elektryczne szeregowe silniki prądu stałego mają zastosowanie w napędach o ste-
292
Wyszukiwarka
Podobne podstrony:
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (7) Korzystamy tu z twierdzenia o trzech siłach. W etapie drugim rozkładamy leżącą na pro
24 luty 07 (82) 3.7.4. Redukcja sił i momentów sił Moc chwilowa siły zredukowanej (momentu zredukowa
więcej podobnych podstron