24 luty 07 (22)
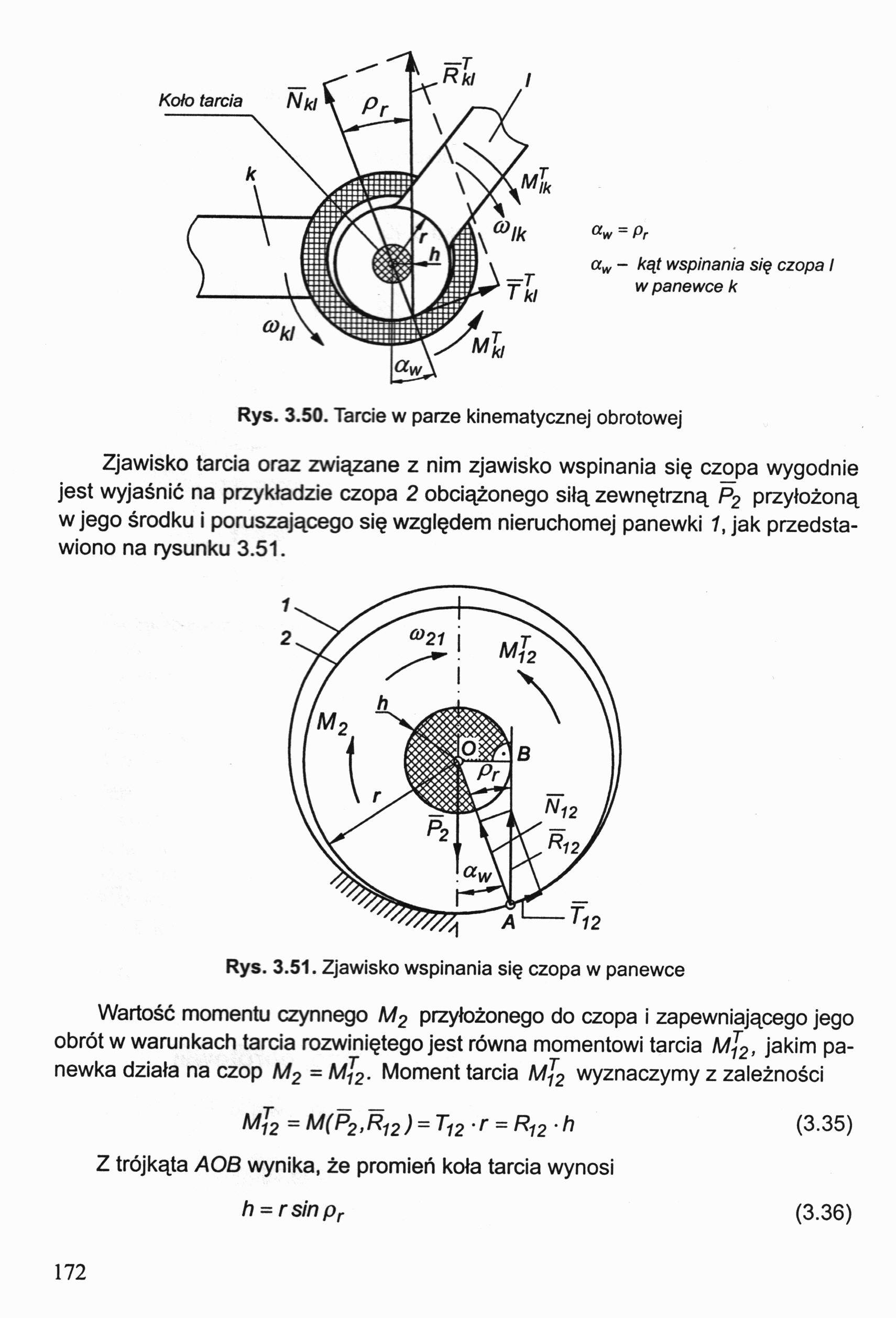
Rys. 3.50. Tarcie w parze kinematycznej obrotowej
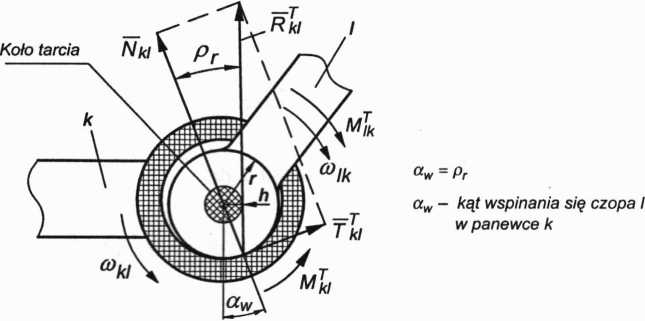
Zjawisko tarcia oraz związane z nim zjawisko wspinania się czopa wygodnie jest wyjaśnić na przykładzie czopa 2 obciążonego siłą zewnętrzną P2 przyłożoną w jego środku i poruszającego się względem nieruchomej panewki 1, jak przedstawiono na rysunku 3.51.
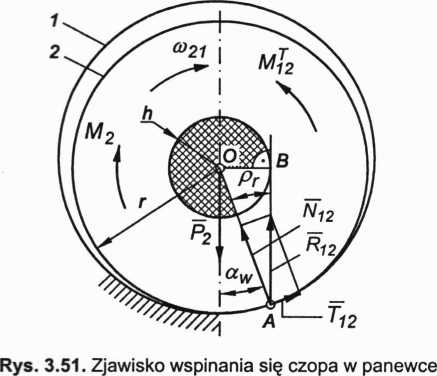
Wartość momentu czynnego M2 przyłożonego do czopa i zapewniającego jego obrót w warunkach tarcia rozwiniętego jest równa momentowi tarcia mJ2, jakim panewka działa na czop M2 = mJ2. Moment tarcia mJ2 wyznaczymy z zależności
mJ2 = M(P2,R12 ) = T12 r = R12 h (3.35)
Z trójkąta AOB wynika, że promień koła tarcia wynosi
h = rsinpr (3.36)
172
Wyszukiwarka
Podobne podstrony:
24 luty 07 (19) Interpretację geometryczną WST w parze kinematycznej płaskiej ki. 5 z dociskiem dwus
24 luty 07 (16) Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze p
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (39) Na zakończenie należy zauważyć, że rozpatrywany model tarcia jest słuszny również dl
24 luty 07 (46) Sprawność przekładni obiegowej zależy od kierunku przepływu energii oraz od wartości
24 luty 07 (71) ruch postępowy masa mc = m3 + m2c pozostaje niewyrównoważona i dlatego środek masy m
24 luty 07 (88) lecz na podstawie (P3.162) mamy 2^ł _ ^ xA a stąd oraz xD _ d xA a’ (P3.164) W celu
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
więcej podobnych podstron