24 luty 07 (16)
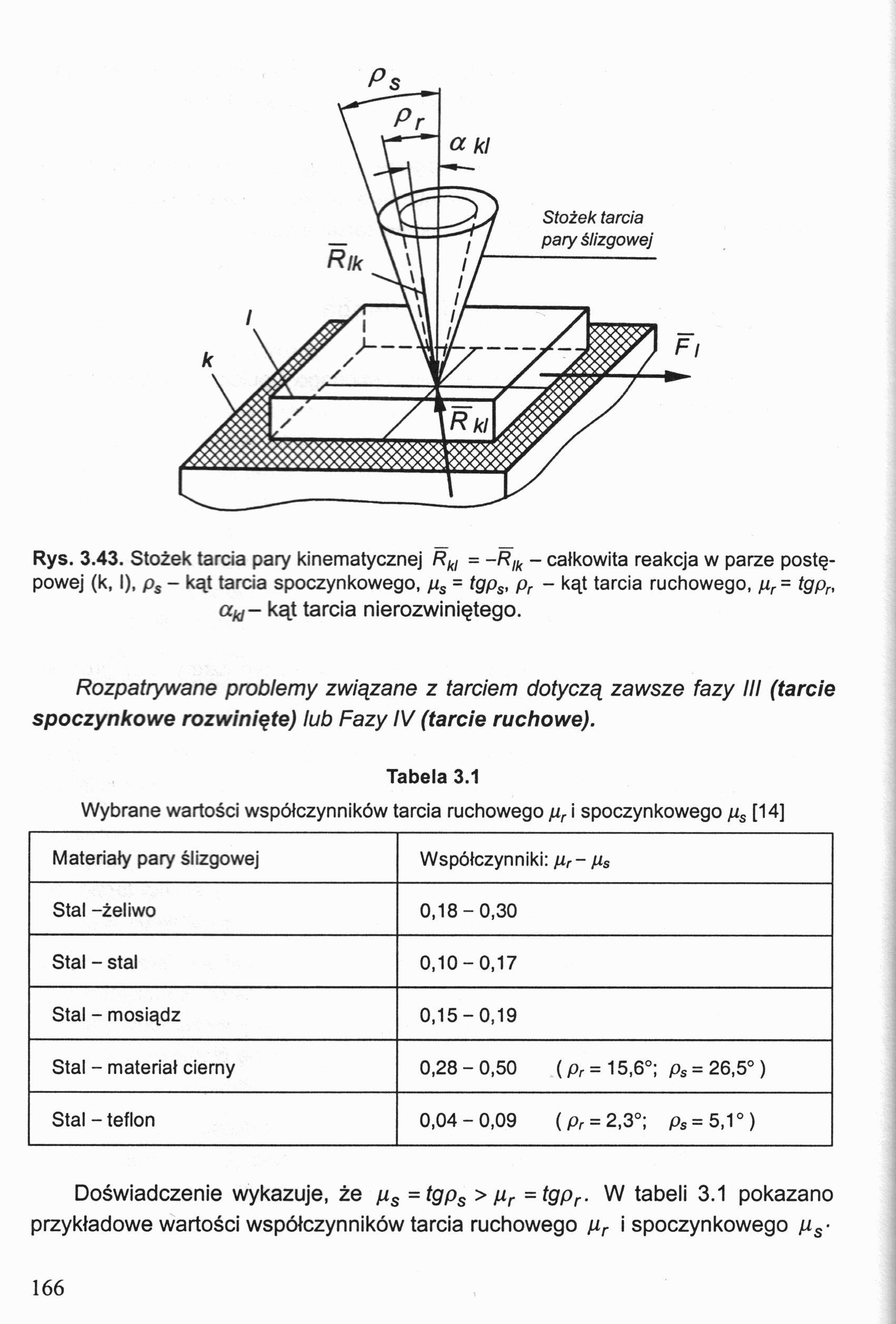
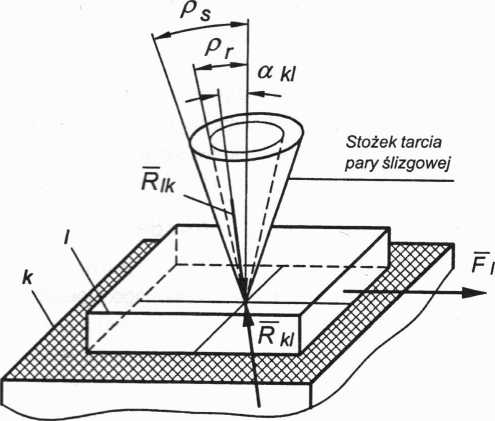
Rys. 3.43. Stożek tarcia pary kinematycznej Rkt = -R,k - całkowita reakcja w parze postępowej (k, I), ps - kąt tarcia spoczynkowego, ps = tgps, pr - kąt tarcia ruchowego, pr = tgpr, aM- kąt tarcia nierozwiniętego.
Rozpatrywane problemy związane z tarciem dotyczą zawsze fazy III (tarcie spoczynkowe rozwinięte) lub Fazy IV (tarcie ruchowe).
Tabela 3.1
Wybrane wartości współczynników tarcia ruchowego pr i spoczynkowego ps [14]
|
Materiały pary ślizgowej |
Współczynniki: pr- ps |
|
Stal -żeliwo |
0,18-0,30 |
|
Stal - stal |
0,10-0,17 |
|
Stal - mosiądz |
0,15-0,19 |
|
Stal - materiał cierny |
0,28-0,50 (pr = 15,6°; ps= 26,5°) |
|
Stal - teflon |
0,04-0,09 (Pr = 2,3°; ps=5,1°) |
Doświadczenie wykazuje, że ps = tgps > pr =tgpr. W tabeli 3.1 pokazano przykładowe wartości współczynników tarcia ruchowego pr i spoczynkowego ps-
166
Wyszukiwarka
Podobne podstrony:
24 luty 07 (38) Znajdujemy teraz siłę tarcia T12. W tym celu siłę reakcji Rj2 zapisujemy w postaci d
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (20) Rys. 3.48. Analiza wykreślna warunku równowagi granicznej członu podpartego na podpo
24 luty 07 (54) Rys. 3.74. Model fizyczny niewyrównoważonego wirnika w postaci cienkich niewyrównowa
24 luty 07 (55) Rys. 3.75. Wektor główny sił bezwładności i moment główny sił bezwładności oraz równ
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (137) M. =a-bo) Ns =(a-bw )a N -a- 40 Rys. 3.131. Charakterystyka silnika o momencie lini
więcej podobnych podstron