24 luty 07 (46)
Sprawność przekładni obiegowej zależy od kierunku przepływu energii oraz od wartości przełożenia.
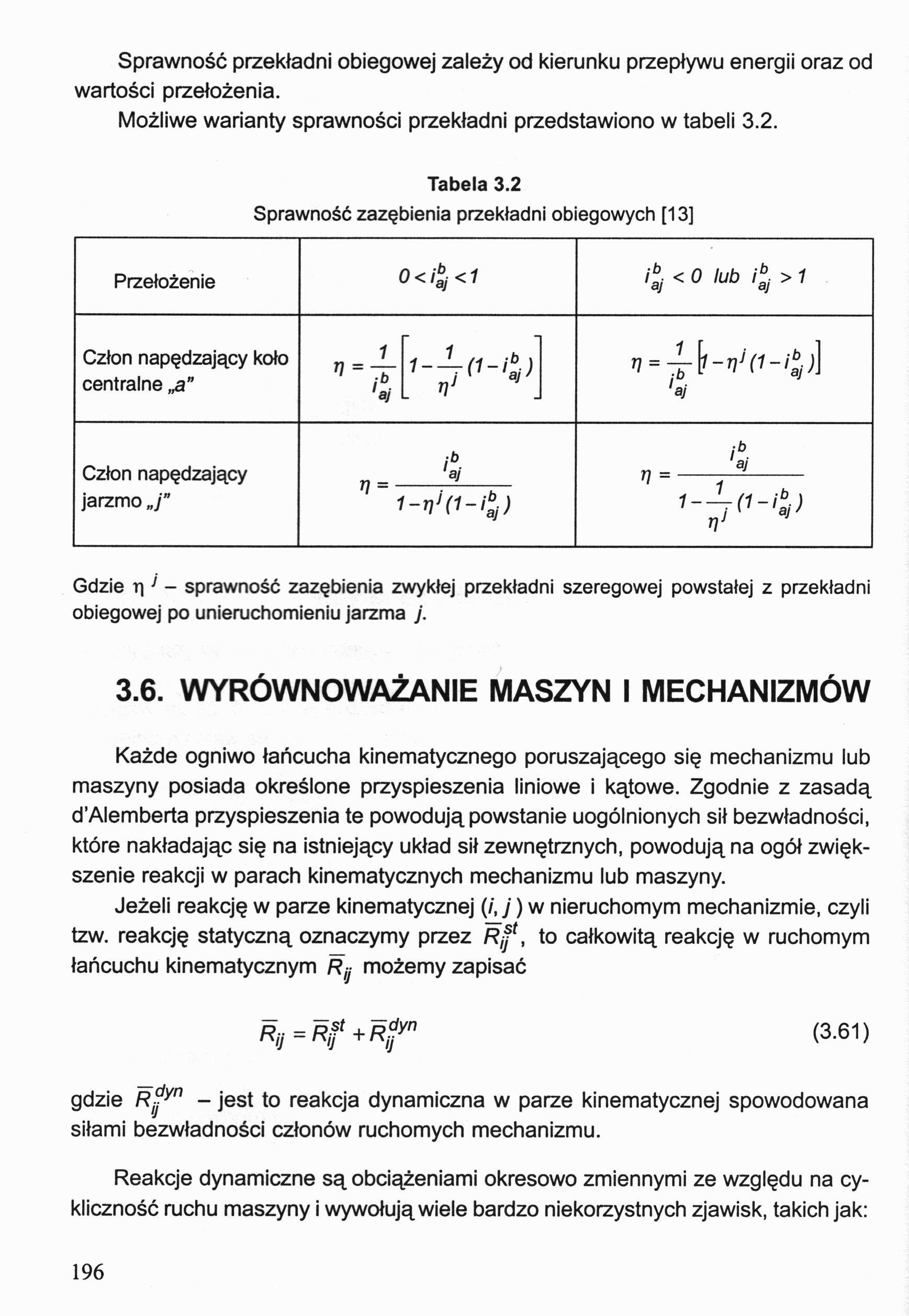
Możliwe warianty sprawności przekładni przedstawiono w tabeli 3.2.
Tabela 3.2
Sprawność zazębienia przekładni obiegowych [13]
|
Przełożenie |
0 < igj < 1 |
i aj < 0 lub ibaj > 1 |
|
Człon napędzający koło centralne „a” |
ri = ^\l-rij(1-ibaj)] 'aj | |
|
Człon napędzający jarzmo „j” |
4 77 1-rij(1-ibaJ) |
4 ??= 1 tiJ |
Gdzie t|y - sprawność zazębienia zwykłej przekładni szeregowej powstałej z przekładni obiegowej po unieruchomieniu jarzma j.
3.6. WYRÓWNOWAŻANIE MASZYN I MECHANIZMÓW
Każde ogniwo łańcucha kinematycznego poruszającego się mechanizmu lub maszyny posiada określone przyspieszenia liniowe i kątowe. Zgodnie z zasadą d’Alemberta przyspieszenia te powodują powstanie uogólnionych sił bezwładności, które nakładając się na istniejący układ sił zewnętrznych, powodują na ogół zwiększenie reakcji w parach kinematycznych mechanizmu lub maszyny.
Jeżeli reakcję w parze kinematycznej (/', j) w nieruchomym mechanizmie, czyli tzw. reakcję statyczną oznaczymy przez R,f, to całkowitą reakcję w ruchomym łańcuchu kinematycznym R,y możemy zapisać
Rjj - Rjf + Rjjyn (3-61)
gdzie R^yn - jest to reakcja dynamiczna w parze kinematycznej spowodowana siłami bezwładności członów ruchomych mechanizmu.
Reakcje dynamiczne są obciążeniami okresowo zmiennymi ze względu na cy-kliczność ruchu maszyny i wywołują wiele bardzo niekorzystnych zjawisk, takich jak:
196
Wyszukiwarka
Podobne podstrony:
24 luty 07 (41) Sprawność mechanizmu wynosi ri = ^=/3"C =1, gdyż
24 luty 07 (45) Sprawność chwilowa dla przyjętych na rysunku parametrów geometrycznych mechanizmu kr
arcz 64 Sprawność przekładni głównej zależy od jej typu i waha się w następujących granicach: - dla
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (88) lecz na podstawie (P3.162) mamy 2^ł _ ^ xA a stąd oraz xD _ d xA a’ (P3.164) W celu
24 luty 07 (32) Ramię tarcia tocznego f (ramię oporu toczenia) nazywane jest także współczynnikiem t
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
więcej podobnych podstron