24 luty 07 (104)
Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależności
C0r
lim a(t) =
t—»<»
a-Mb
b
(P3.197)
Po czasie t3 = 3T prędkość kątowa osiąga 95% wartości ustalonej cop w trzecim etapie pracy układu napędowego, stąd t3 możemy traktować jako czas hamowania trzeciego etapu. Ponieważ stała czasowa układu T się nie zmieniła to
h = h-
Przyspieszenie kątowe w trzecim etapie pracy układu napędowego wyznaczymy na podstawie (P3.196)
£(t)=daŁ = MtL( 1' -' ' dt b
e T =-
e'T
Jzr
(P3.198)
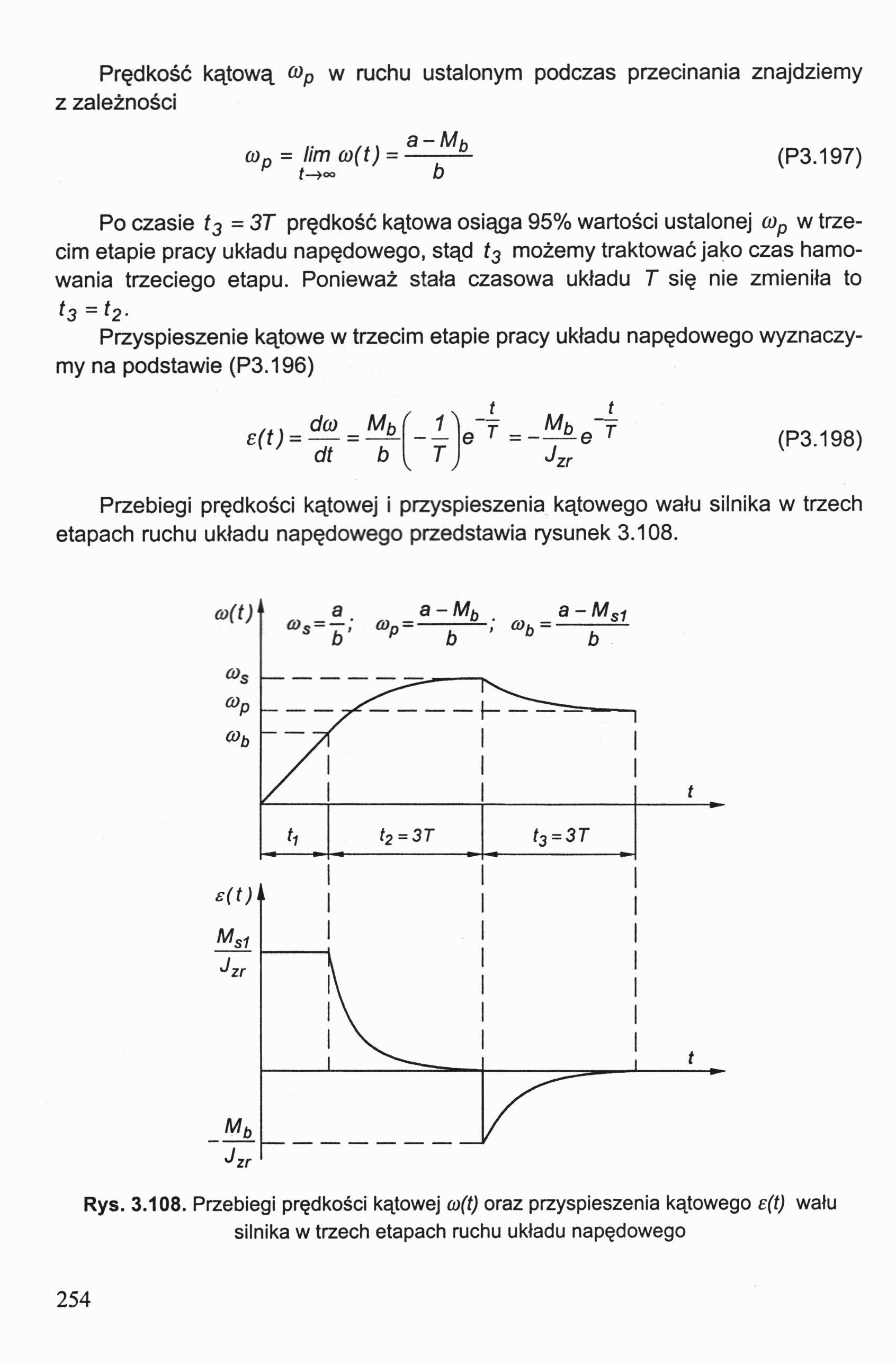
Przebiegi prędkości kątowej i przyspieszenia kątowego wału silnika w trzech etapach ruchu układu napędowego przedstawia rysunek 3.108.
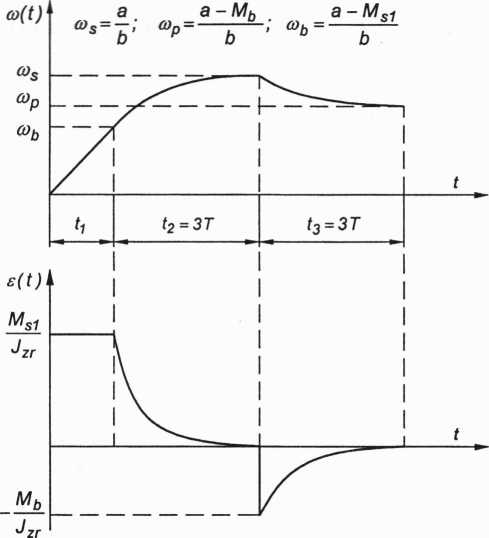
Rys. 3.108. Przebiegi prędkości kątowej a>(t) oraz przyspieszenia kątowego e(ł) wału silnika w trzech etapach ruchu układu napędowego
254
Wyszukiwarka
Podobne podstrony:
24 luty 07 (127) Rozwiązanie W cyklu ruchu ustalonego praca sił czynnych jest równa pracy sił bierny
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (125) Zasada równowartości energii kinetycznej i pracy dla części cyklu ruchu ustalonego
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (113) Na podstawie planu prędkości otrzymamy: VS1 = ai ■ ias1 ~ VI lAS1 VS2 =(01 h =<
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (11) Uogólnionym przesunięciem przygotowanym <% w ruchu postępowym lub 8ęj w ruchu obr
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (121) lub gdzie: a>max vmax U) min< v min aśr< vśr $ _ vmax vmin Vśr prędk
24 luty 07 (122) Napiszemy teraz równanie ruchu maszyny w postaci energetycznej dla części cyklu zaw
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (143) rowanej w dużym zakresie prędkości obrotowej, w urządzeniach pracujących przy znacz
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (24) Etap 1. Analiza prędkości względnych Vę=VB + VęB vB=m1- AB W2=^ę, W3=Y<ł 2 BC 3 C
więcej podobnych podstron