24 luty 07 (127)
Rozwiązanie
W cyklu ruchu ustalonego praca sił czynnych jest równa pracy sił biernych
Lc = Lb (P3.270)
Praca sił czynnych dla jednego cyklu ruchu ustalonego wynosi
Lc = 2nMc (P3.271)
Praca sił biernych dla jednego cyklu ruchu ustalonego na podstawie rysunku 3. 122b wynosi
Lb = J Mb{ę]d(p = 20-- + --20-- = 15n N-m (P3.272) 0 2 2 2
stąd
2nMc = 15n, czyli Mc = 7,5 N-m.
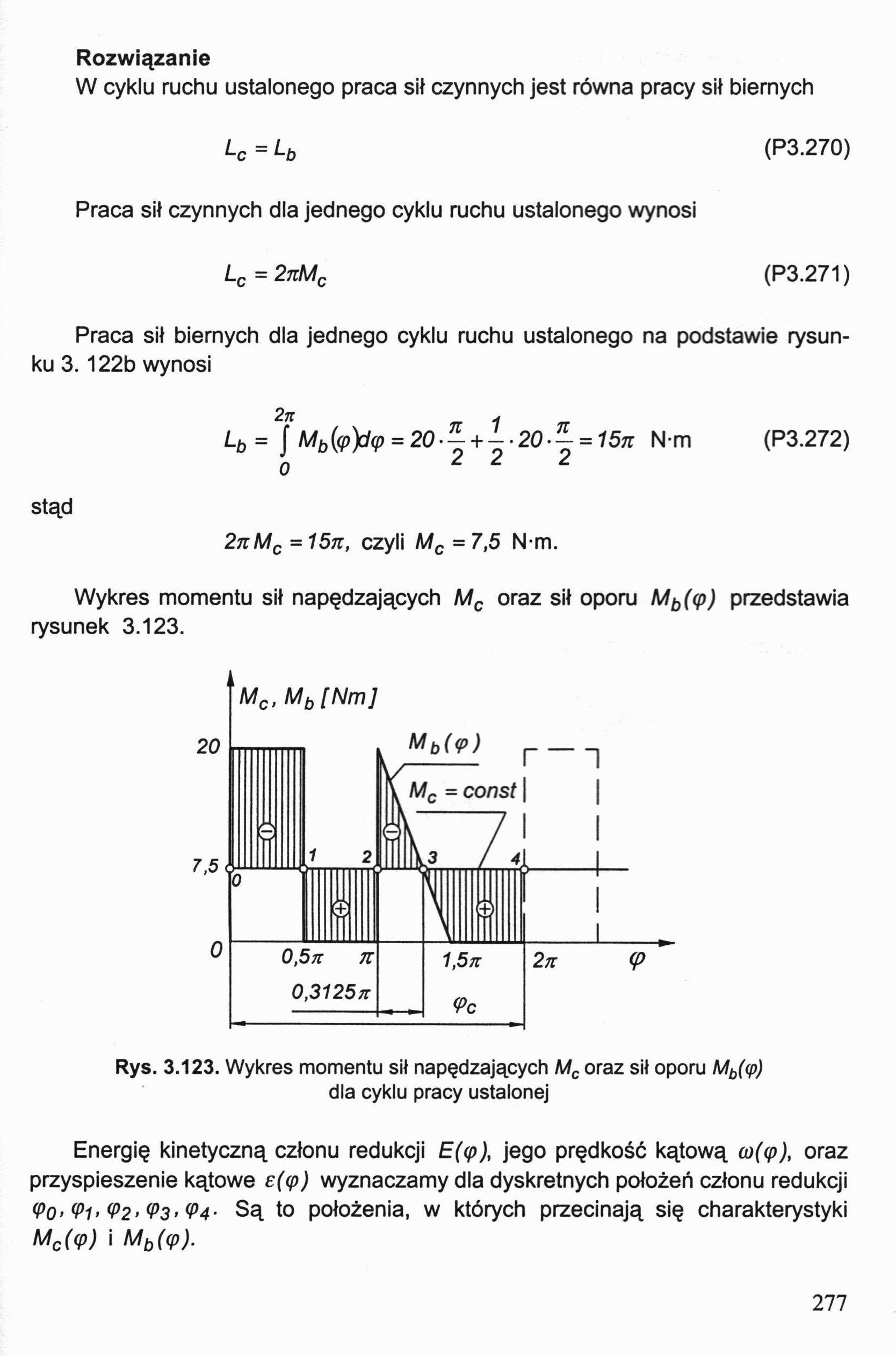
Wykres momentu sił napędzających Mc oraz sił oporu Mb (ę) przedstawia rysunek 3.123.

Rys. 3.123. Wykres momentu sił napędzających Mc oraz sił oporu Mb(ę) dla cyklu pracy ustalonej
Energię kinetyczną członu redukcji E(ę), jego prędkość kątową co((p), oraz przyspieszenie kątowe e(ę) wyznaczamy dla dyskretnych położeń członu redukcji <Po- <Pi< <P2> V3’ V4- Są to położenia, w których przecinają się charakterystyki MC(<P) i Mb(q>).
277
Wyszukiwarka
Podobne podstrony:
24 luty 07 (104) Prędkość kątową a>p w ruchu ustalonym podczas przecinania znajdziemy z zależnośc
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (40) Rozwiązanie W pierwszym etapie rozwiązania przeprowadzamy analizę statyczną mechaniz
24 luty 07 (89) Rozwiązanie Rysunek 3.102a przedstawia model fizyczny układu napędowego, natomiast r
24 luty 07 (32) Ramię tarcia tocznego f (ramię oporu toczenia) nazywane jest także współczynnikiem t
24 luty 07 (125) Zasada równowartości energii kinetycznej i pracy dla części cyklu ruchu ustalonego
24 luty 07 (122) Napiszemy teraz równanie ruchu maszyny w postaci energetycznej dla części cyklu zaw
24 luty 07 (98) Z zależności (3.134) wynika, że dla okresu ruchu ustalonego maszyny praca sił czynny
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (11) Uogólnionym przesunięciem przygotowanym <% w ruchu postępowym lub 8ęj w ruchu obr
24 luty 07 (120) 3.7.7. Nierównomierność biegu maszyny.Dobór koła zamachowego Cechą charakterystyczn
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (3) Metoda Culmana umożliwia rozwiązanie graficzne zagadnienia równowagi czterech sił o z
więcej podobnych podstron