24 luty 07 (40)
Rozwiązanie
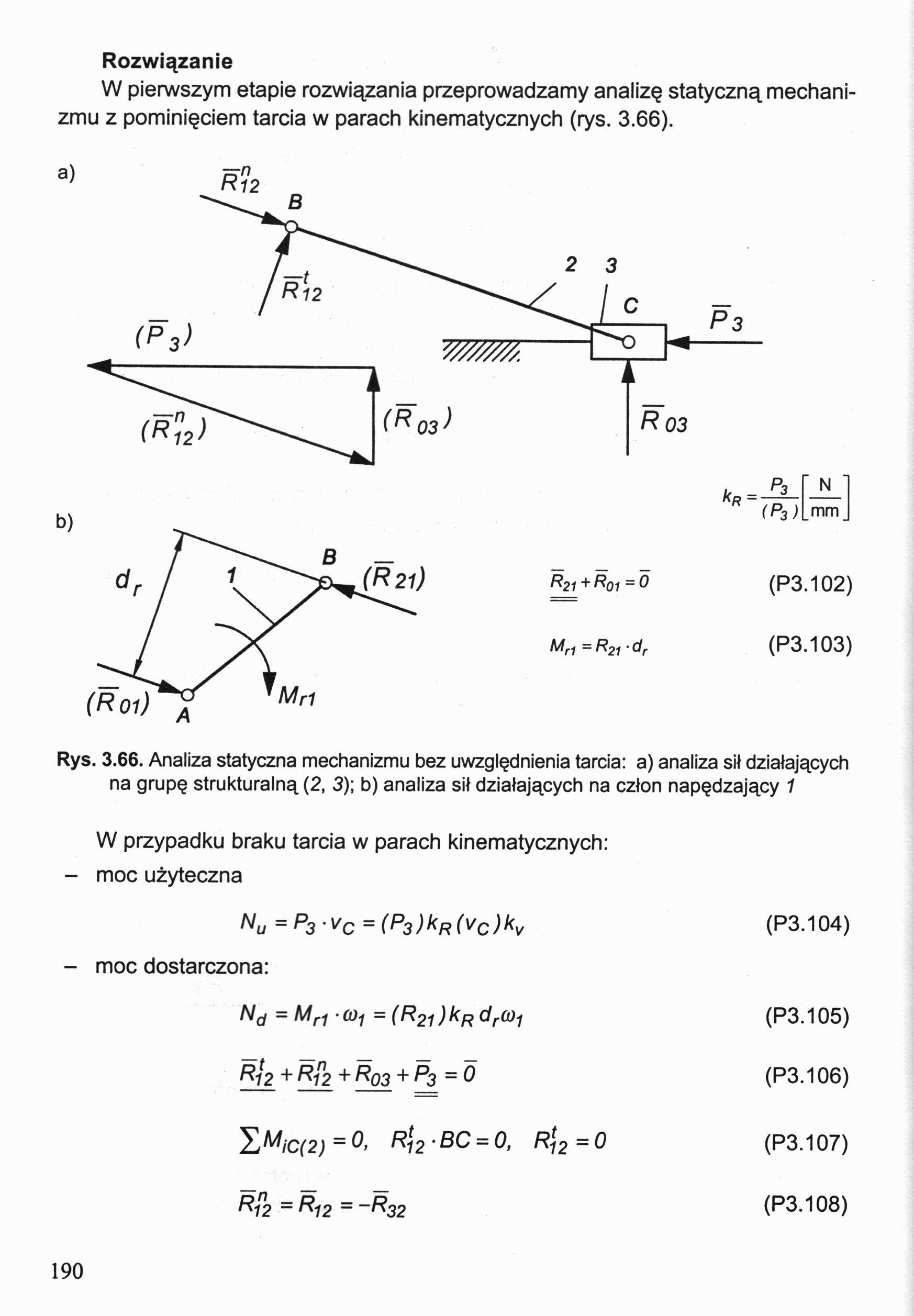
W pierwszym etapie rozwiązania przeprowadzamy analizę statyczną mechanizmu z pominięciem tarcia w parach kinematycznych (rys. 3.66).
R12

Rys. 3.66. Analiza statyczna mechanizmu bez uwzględnienia tarcia: a) analiza sił działających na grupę strukturalną (2, 3); b) analiza sił działających na człon napędzający 1
W przypadku braku tarcia w parach kinematycznych:
- moc użyteczna
Nu=P3-vc=(P3)kR(vc)kv (P3.104)
- moc dostarczona:
Nrf = Mrf ■ Wi = (R21 )kR dr(i>i (P3.105)
Rj2+R^ + Ro3 + P3 =Ó (P3.106)
lMiC(2) = 0, R\2BC = 0, R*2 = 0 (P3.107)
Rfe = R12 = -R32 (P3.108)
190
Wyszukiwarka
Podobne podstrony:
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (106) Rozwiązanie Rozwiązanie zadania podzielimy na sześć etapów.Etap 1 Wyznaczenie zależ
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (127) Rozwiązanie W cyklu ruchu ustalonego praca sił czynnych jest równa pracy sił bierny
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (89) Rozwiązanie Rysunek 3.102a przedstawia model fizyczny układu napędowego, natomiast r
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (3) Metoda Culmana umożliwia rozwiązanie graficzne zagadnienia równowagi czterech sił o z
24 luty 07 (4) Rys. 3.37. Graficzne rozwiązanie zagadnienia równowagi płaskiego dowolnego układu czt
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (72) Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia k
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
więcej podobnych podstron