24 luty 07 (24)
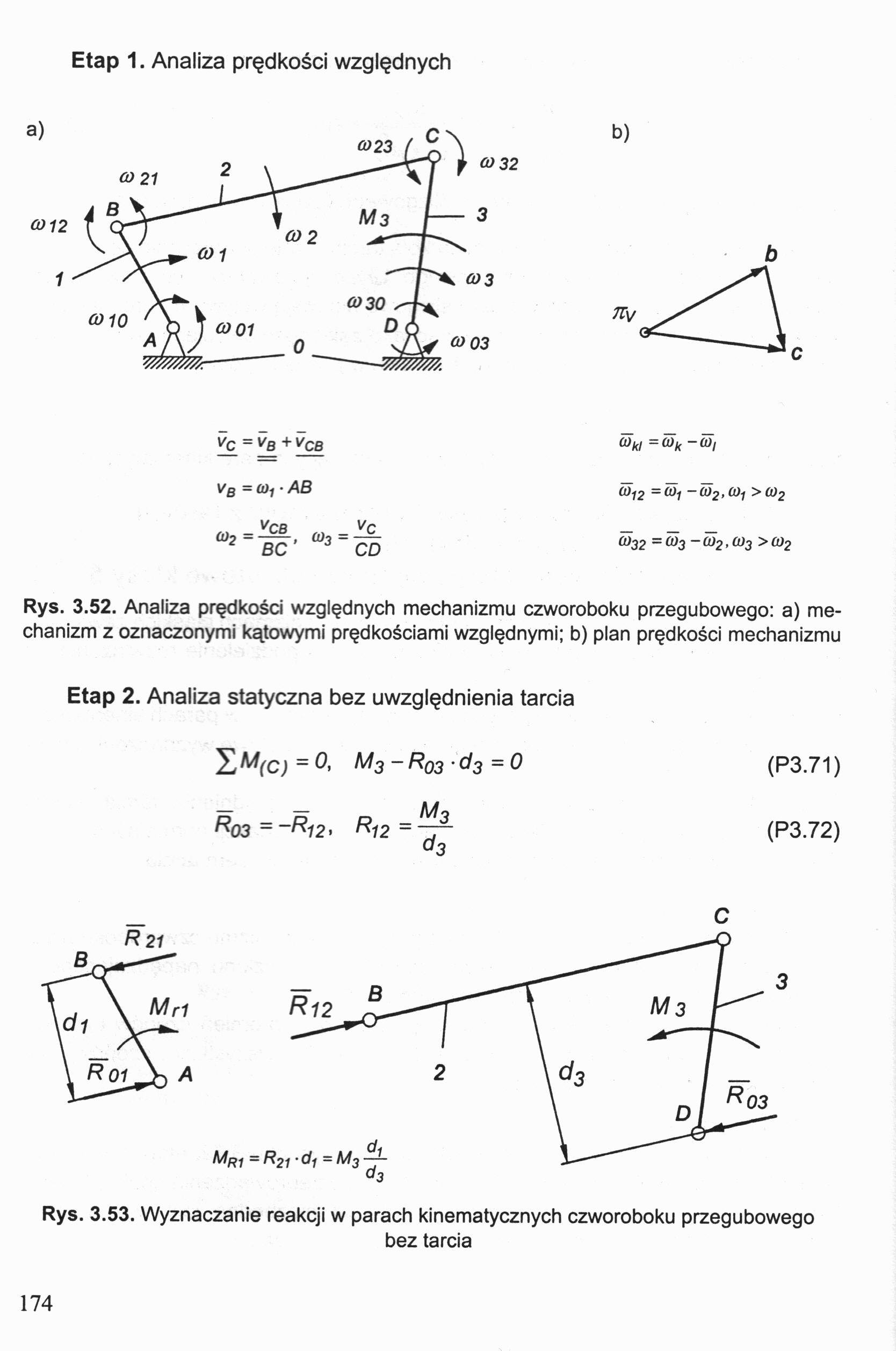
Etap 1. Analiza prędkości względnych

Vę=VB + VęB vB=m1- AB
W2=^ę, W3=Y<ł
2 BC 3 CD
"w w/
ÓJ,2 =<u( -F)2,(i>1 >oi2
CO32 = ^3 — > ^3 ^2
Rys. 3.52. Analiza prędkości względnych mechanizmu czworoboku przegubowego: a) mechanizm z oznaczonymi kątowymi prędkościami względnymi; b) plan prędkości mechanizmu
Etap 2. Analiza statyczna bez uwzględnienia tarcia
= 0, M3-R03d3=0 (P3.71)
- r^ M3
r12■ R12=~r (P3.72)
'ZM(C)
r03 = ~
R21


Mr1 - R :
Rys. 3.53. Wyznaczanie reakcji w parach kinematycznych czworoboku przegubowego
bez tarcia
174
Wyszukiwarka
Podobne podstrony:
24 luty 07 (25) Etap 3. Analiza statyczna z uwzględnieniem tarcia 1M(C)=0, M3-RT03-dT3 =0 (P3.73)
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
23 luty 07 (92) Etap 2 Analiza mechanizmu korbowo-suwakowego opisanego wielobokiem wektorowym (P2.92
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (2) c* ^ b) Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od wi
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
24 luty 07 (8) Rys. 3.40. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (7) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW.......... 297 4.1.
23 luty 07 (90) W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy pierwsze z
23 luty 07 (69) Rysując wektor (vDB) z końca wektora (vB) znajdziemy punkt d stanowiący koniec wekto
24 luty 07 (28) Rysunek 3.57 przedstawia wieloboki sił wykonane w trakcie analizy mechanizmu bez uwz
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
więcej podobnych podstron