24 luty 07 (2)
c* ^
b)
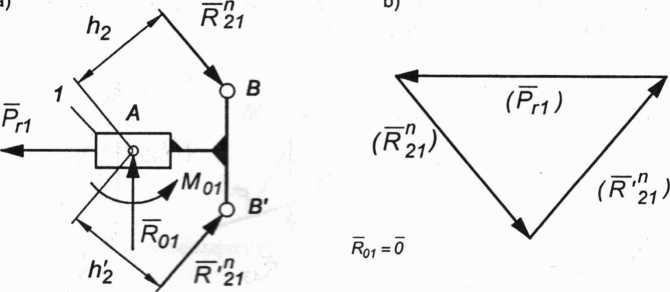
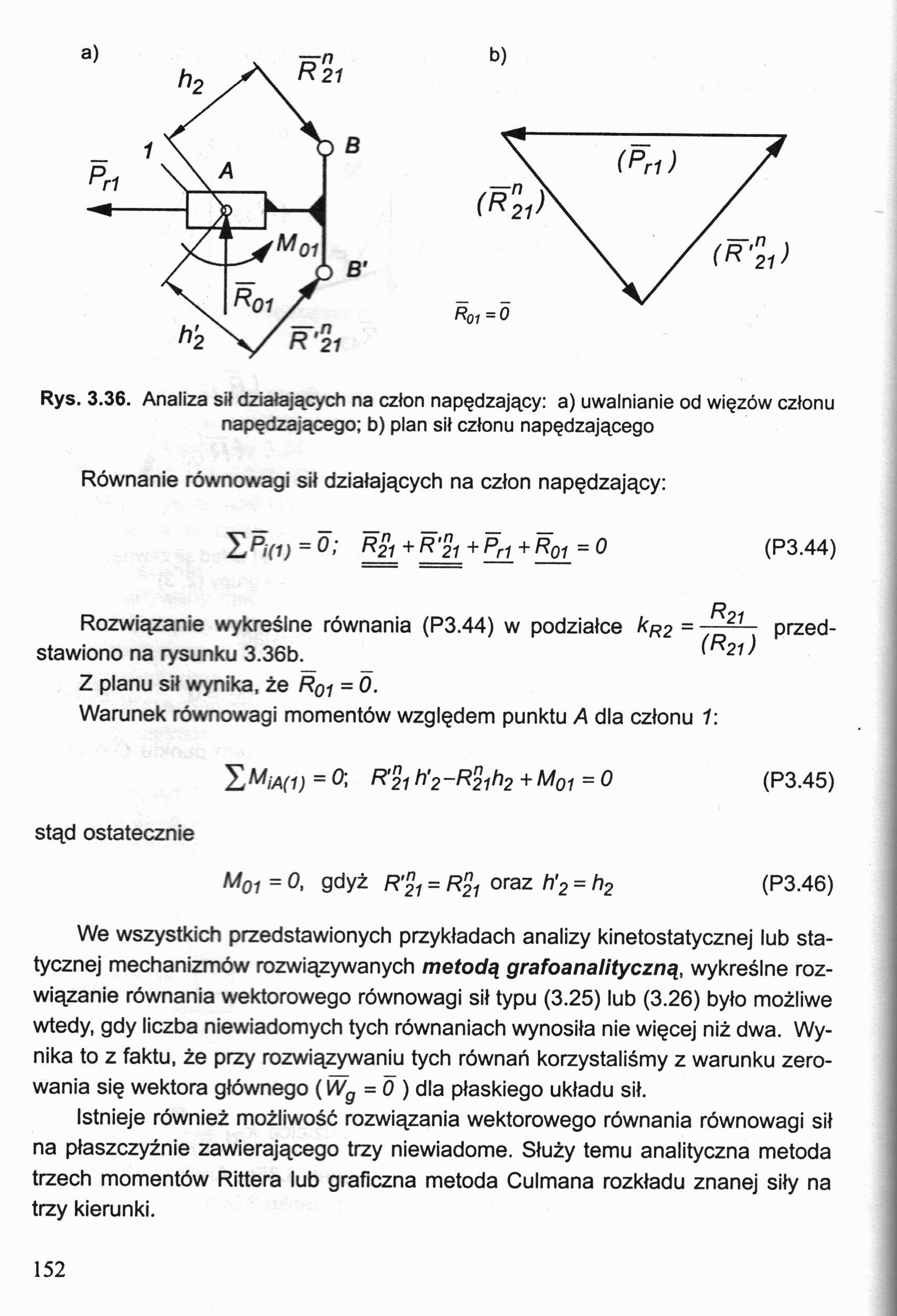
Rys. 3.36. Analiza sił działających na człon napędzający: a) uwalnianie od więzów członu napędzającego: b) plan sił członu napędzającego
Równanie równowagi sił działających na człon napędzający:
^Pi(1)=°! R21 +R,21 + Pr1 + R01 =0
Rozwiązanie wykreślne równania (P3.44) w podziałce kR2 =
stawiono na rysunku 3.36b.
Z planu sił wynika, że R01 = 0.
Warunek równowagi momentów względem punktu A dla członu
(P3.44)
1:
YjMiA(1) - °< R,21 h'2-R21h2 + M01 = 0
(P3.45)
stąd ostatecznie
M01 = 0, gdyż R'^ = oraz h'2 = h2
(P3.46)
We wszystkich przedstawionych przykładach analizy kinetostatycznej lub statycznej mechanizmów rozwiązywanych metodą grafoanalityczną, wykreślne rozwiązanie równania wektorowego równowagi sił typu (3.25) lub (3.26) było możliwe wtedy, gdy liczba niewiadomych tych równaniach wynosiła nie więcej niż dwa. Wynika to z faktu, że przy rozwiązywaniu tych równań korzystaliśmy z warunku zerowania się wektora głównego (Wg = 0 ) dla płaskiego układu sił.
Istnieje również możliwość rozwiązania wektorowego równania równowagi sił na płaszczyźnie zawierającego trzy niewiadome. Służy temu analityczna metoda trzech momentów Rittera lub graficzna metoda Culmana rozkładu znanej siły na trzy kierunki.
152
Wyszukiwarka
Podobne podstrony:
24 luty 07 (26) Etap 2. Analiza sił działających na człony mechanizmu bez uwzględnienia tarcia Zadan
24 luty 07 (27) Etap 3. Analiza sił działających na człony mechanizmu z uwzględnieniem sił tarcia Pr
23 luty 07 (148) Równanie równowagi sił działających na człon napędzający ma postać R21 + Bi + Rqi +
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
24 luty 07 (8) Rys. 3.40. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (4) Rys. 3.37. Graficzne rozwiązanie zagadnienia równowagi płaskiego dowolnego układu czt
24 luty 07 (25) Etap 3. Analiza statyczna z uwzględnieniem tarcia 1M(C)=0, M3-RT03-dT3 =0 (P3.73)
24 luty 07 (44) Równania równowagi sil bez uwzględnienia tarcia (P3.118) P2 + R02 + R02 + R12 ~
otrzymuje się: jAh m (2D-Ah m ) u = -- D - Ah max Rys. III/6. Schemat sił działających na pasmo mate
sche 1 2 Sh cosxs Rys. 4.57. Schemat sił działających na zry warkę a — warunek stateczności, b — pod
więcej podobnych podstron