24 luty 07 (50)

Do każdej z mas układu przyłożono siłę bezwładności B; o składowych normalnej B-1 = -m,• • a/1 oraz stycznej B- = -m,• • a/, zgodnie z rysunkiem 3.73.
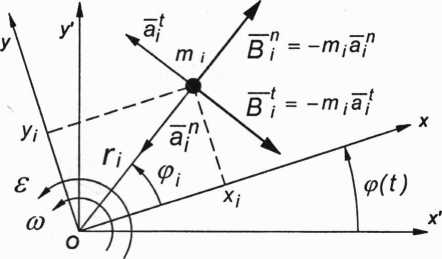
Rys. 3.73. Składowe siły bezwładności działające na pojedynczą masę skupioną m,-Współrzędne siły bezwładności B(- wynoszą odpowiednio:
2 X#
B" = m/r/ft)2 cos<p/ = rrijrjCO — = mixico2
ri
B”y = mjr,(o2 sirupj = mjrjO)2 — = /77/y(<w2
(3.62)
b|, = mirjssincpi = mj^e— = mjyje
ri
bL = -mjrjEcoscpj =
Należy zauważyć, że b£ = B-z = 0, ponieważ siły bezwładności działają w płaszczyznach prostopadłych do osi wirnika.
Aby wyznaczyć współrzędne wektora głównego sił bezwładności B(Bx,By,Bz) oraz momentu głównego sił bezwładności MB(MBx,MBy,MBz), należy przeprowadzić sumowanie sił i momentów dla wszystkich mas układu. Wprowadzimy dodatkowo oznaczenia:
Sy =Mxs = Jjmixi, Sx=Mys = Yjmiyi (3.63)
i=1 i=1
200
Wyszukiwarka
Podobne podstrony:
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
24 luty 07 (135) Własności mechaniczne zespołów układu napędowego opisują tzw. charakterystyki mecha
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
24 luty 07 (75) Zatem przejście od rzeczywistego obiektu (maszyny), czyli układu o nieskończonej lic
23 luty 07 (50) Podczas ruchu mechanizmu suwak 4 pozostaje stale w płaszczyźnie Oxy, a zatem jego ru
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (144) Ad a) W zasadzie dąży się do stosowania silników wysokoobrotowych jako mniejszych i
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (22) Rys. 3.50. Tarcie w parze kinematycznej obrotowej Zjawisko tarcia oraz związane z ni
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (48) Maszyny o dużych wymiarach, ciężkie, trudne do demontażu można wyważać w trakcie eks
24 luty 07 (4) Rys. 3.37. Graficzne rozwiązanie zagadnienia równowagi płaskiego dowolnego układu czt
więcej podobnych podstron