24 luty 07 (133)
Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz kalkulacyjny EXCEL. Dla zautomatyzowania obliczeń doboru koła zamachowego opracowano własny program pod nazwą NAPĘD działający zgodnie z algorytmem przedstawionym na rysunku 3.118.
Graficzną ilustrację wprowadzonych danych oraz wyników obliczeń momentu bezwładności koła zamachowego w programie NAPĘD przedstawia rysunek 3.125.
3.7.8. Charakterystyki mechaniczne zespołów układu napędowego.
Dobór silnika napędowego
Pod pojęciem układu napędowego rozumiemy taki obiekt mechaniczny, w którym można wyróżnić trzy zasadnicze zespoły:
1) silnik napędowy,
2) przekładnię,
3) maszynę roboczą (mechanizm roboczy).
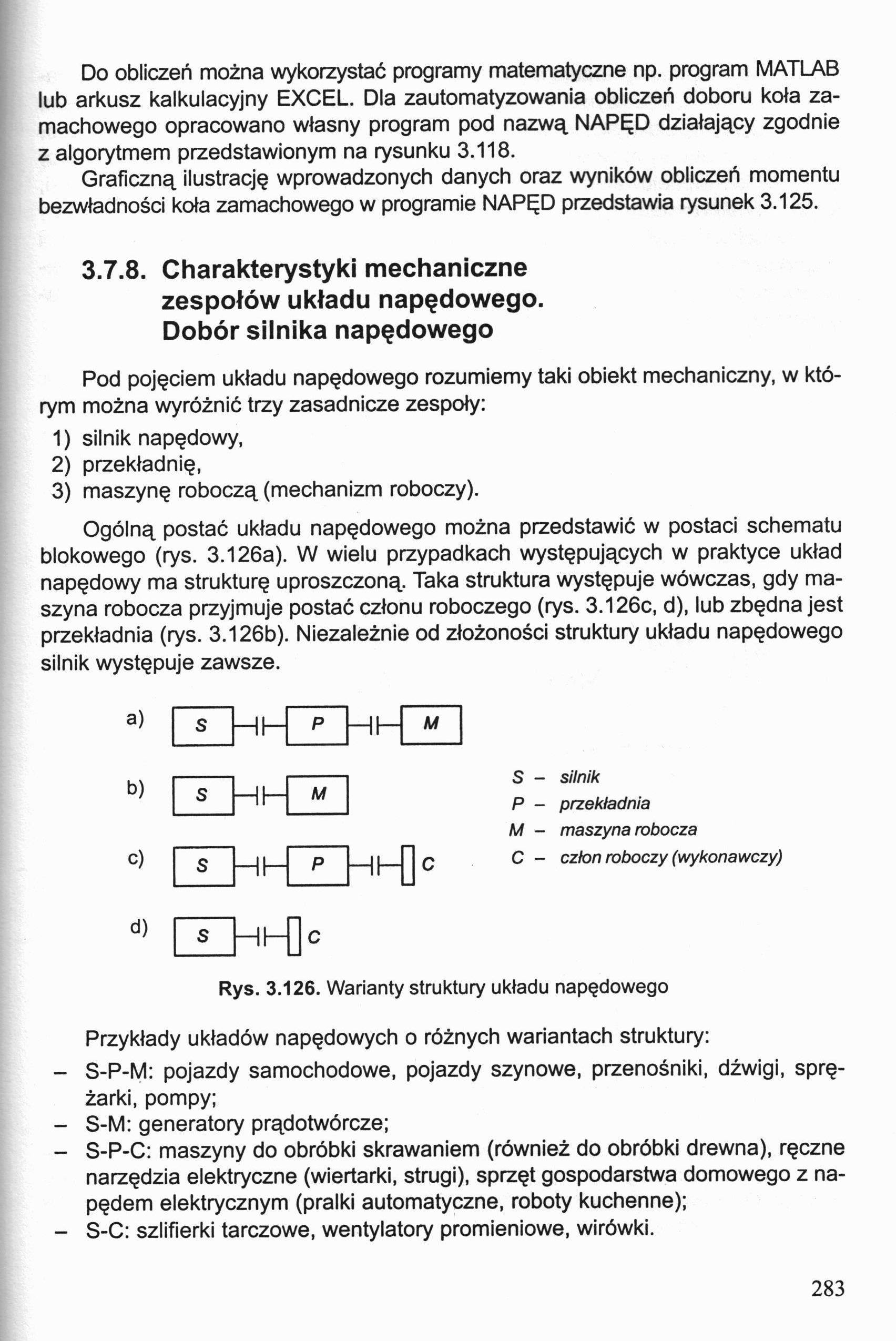
Ogólną postać układu napędowego można przedstawić w postaci schematu blokowego (rys. 3.126a). W wielu przypadkach występujących w praktyce układ napędowy ma strukturę uproszczoną. Taka struktura występuje wówczas, gdy maszyna robocza przyjmuje postać członu roboczego (rys. 3.126c, d), lub zbędna jest przekładnia (rys. 3.126b). Niezależnie od złożoności struktury układu napędowego silnik występuje zawsze.
hHZD-iHZ
a)
S - silnik P - przekładnia M - maszyna robocza C - człon roboczy (wykonawczy)
b) Q
c) S
d> GG-n-Oc
Rys. 3.126. Warianty struktury układu napędowego
Przykłady układów napędowych o różnych wariantach struktury:
- S-P-M: pojazdy samochodowe, pojazdy szynowe, przenośniki, dźwigi, sprężarki, pompy;
- S-M: generatory prądotwórcze;
- S-P-C: maszyny do obróbki skrawaniem (również do obróbki drewna), ręczne narzędzia elektryczne (wiertarki, strugi), sprzęt gospodarstwa domowego z napędem elektrycznym (pralki automatyczne, roboty kuchenne);
- S-C: szlifierki tarczowe, wentylatory promieniowe, wirówki.
283
Wyszukiwarka
Podobne podstrony:
24 luty 07 (35) Współczynnik sprawności można wyznaczyć analitycznie, korzystając ze wzorów (3.51).
24 luty 07 (50) Do każdej z mas układu przyłożono siłę bezwładności B; o składowych normalnej B-1 =
24 luty 07 (48) Maszyny o dużych wymiarach, ciężkie, trudne do demontażu można wyważać w trakcie eks
23 luty 07 (64) Przyspieszenie punktu K można również znaleźć, obliczając w pierwszym 6 • BK zrównać
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (110) Obliczenie przyśpieszenia kątowego wału silnika (es(t) = e-i(t)) £t = ~~e T Jzrs (P
24 luty 07 (114) Rys. 3.115. Wykres zredukowanego momentu bezwładności mechanizmu jarzmowego Jzn((Pi
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (119) Można w ten sposób badać rozruch układu napędowego przyjmując zerowe warunki począt
24 luty 07 (126) Dodatkowo, jeśli jest mały, to pomijając go w obliczeniach, uzysk
24 luty 07 (128) Obliczamy nadwyżki pracy sił czynnych i biernych pomiędzy tymi położeniami: L01 = -
24 luty 07 (136) Można wyróżnić cztery rodzaje teoretycznych charakterystyk silników.1)
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
24 luty 07 (144) Ad a) W zasadzie dąży się do stosowania silników wysokoobrotowych jako mniejszych i
24 luty 07 (153) W programie AKM można modelować grupę strukturalną w ten sposób, że będzie mieć pun
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (6) Rys. 3.39. Analiza statyczna grupy strukturalnej P-0-0 z wykorzystaniem prostej Culma
więcej podobnych podstron