24 luty 07 (126)
Dodatkowo, jeśli jest mały, to pomijając go w obliczeniach, uzyskujemy
Jk=^¥*7 (3-165)
Wzory (3.164) oraz (3.165) służą do obliczania momentu bezwładności koła zamachowego w sposób przybliżony. Ponadto wzór (3.165) ma identyczną postać co (3.154).
Przykład 3.36
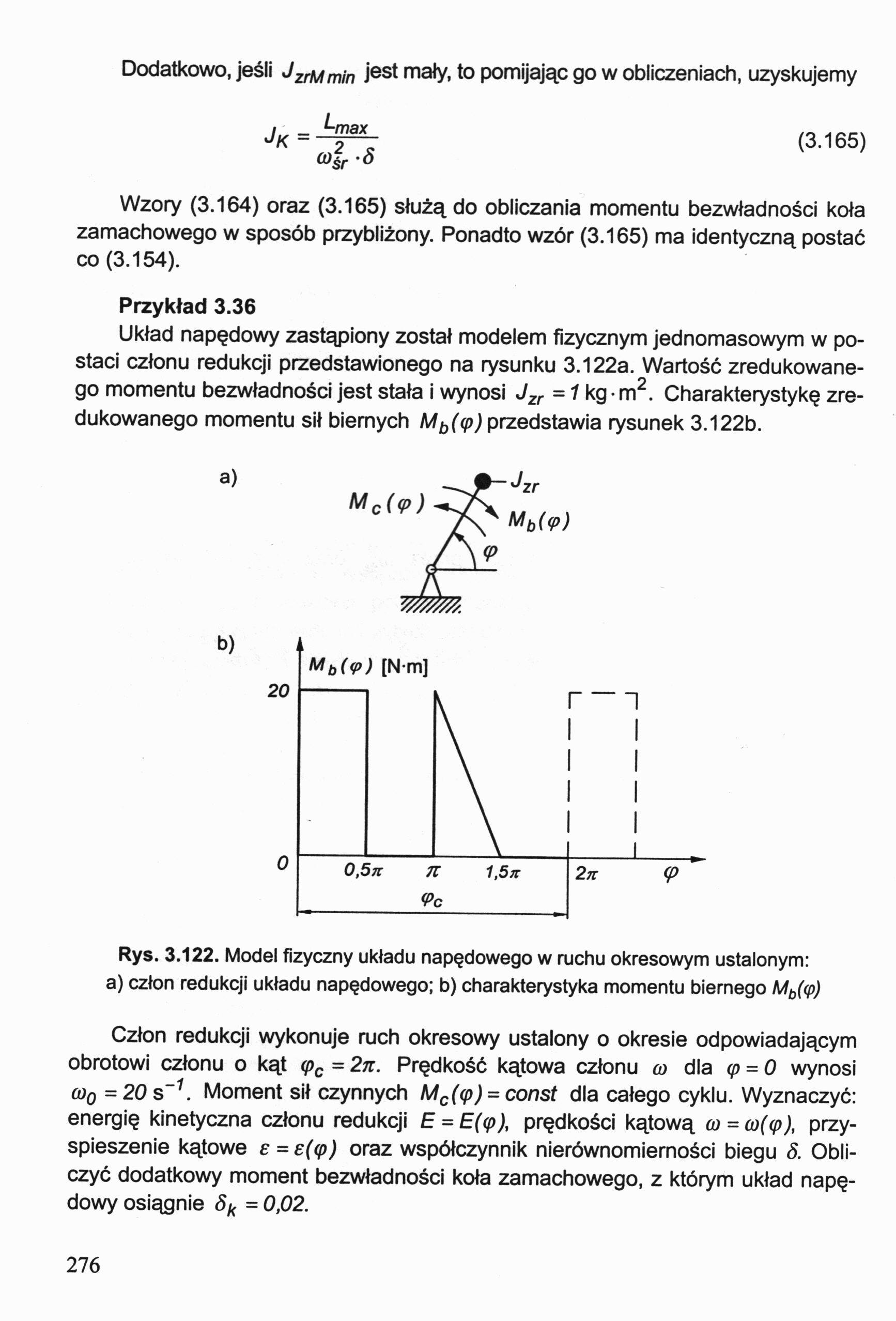
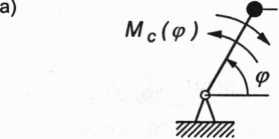
Układ napędowy zastąpiony został modelem fizycznym jednomasowym w postaci członu redukcji przedstawionego na rysunku 3.122a. Wartość zredukowanego momentu bezwładności jest stała i wynosi Jzr = 1 kg-m2. Charakterystykę zredukowanego momentu sił biernych Mb((p) przedstawia rysunek 3.122b.
Jzr
Mb(<p)
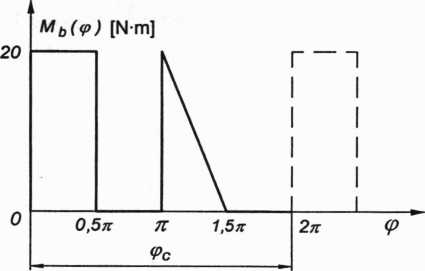
Rys. 3.122. Model fizyczny układu napędowego w ruchu okresowym ustalonym: a) człon redukcji układu napędowego; b) charakterystyka momentu biernego Mb(cp)
Człon redukcji wykonuje ruch okresowy ustalony o okresie odpowiadającym obrotowi członu o kąt (pc = 2n. Prędkość kątowa członu co dla ę = 0 wynosi a>0 -20 s~1. Moment sił czynnych Mc(q>) = const dla całego cyklu. Wyznaczyć: energię kinetyczna członu redukcji E = E((p), prędkości kątową oj = co(cp), przyspieszenie kątowe e=e(ę) oraz współczynnik nierównomierności biegu 8. Obliczyć dodatkowy moment bezwładności koła zamachowego, z którym układ napędowy osiągnie 8k = 0,02.
276
Wyszukiwarka
Podobne podstrony:
24 luty 07 (84) Natomiast, jeśli otrzymamy Pzr(0 lub Mzr(0, to oznacza, że siła zredukowana jest sił
24 luty 07 (53) Jeśli spełnione są równocześnie warunki (3.69) / (3.70), wówczas oś obrotu jest głów
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (127) Rozwiązanie W cyklu ruchu ustalonego praca sił czynnych jest równa pracy sił bierny
24 luty 07 (138) ustalony trwa do momentu osiągnięcia nowego stanu równowagi. Na rysunku 3.132 jest
24 luty 07 (145) Ad c) W przypadku zmian obciążenia silnika w bardzo szerokich granicach należy doda
24 luty 07 (156) 4.2. PROGRAM SAM- Simulation and Analysis of Mechanisms Program SAM [17] przeznaczo
24 luty 07 (157) 4.3. PROGRAM WORKING MODEL Program Working Model [19], dostępny obecnie w wersji 2D
24 luty 07 (158) 4.4. PROGRAM WATT W odróżnieniu programów prezentowanych wcześniej, program Watt je
24 luty 07 (32) Ramię tarcia tocznego f (ramię oporu toczenia) nazywane jest także współczynnikiem t
24 luty 07 (39) Na zakończenie należy zauważyć, że rozpatrywany model tarcia jest słuszny również dl
24 luty 07 (56) Założymy, że wał wirnika jest konstrukcyjnie i technologicznie wyrównoważo-ny. Stan
24 luty 07 (57) Ścisłe spełnienie warunków wyrównoważenia dynamicznego wirnika na etapie konstruowan
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (59) W równaniach (P3.126) występuje 6 niewiadomych: mki,mk2,rk1,rk2,ęk1,ęk2. Przyjmujemy
24 luty 07 (73) 3.7. MODELOWANIE DYNAMICZNE MASZYN Jedną z dziedzin fenomenologii, czyli nauki o poz
24 luty 07 (82) 3.7.4. Redukcja sił i momentów sił Moc chwilowa siły zredukowanej (momentu zredukowa
więcej podobnych podstron