24 luty 07 (59)
W równaniach (P3.126) występuje 6 niewiadomych: mki,mk2,rk1,rk2,ęk1,ęk2. Przyjmujemy jako niewiadome momenty statyczne mas korekcyjnych: S1 = mkirki i S2 = mk2rk2 oraz kąty <Pki< <Pk2' redukując w ten sposób liczbę niewiadomych do czterech. Rozwiązujemy układ równań (P3.126) otrzymując:
P3.127)
Przeprowadzone obliczenia wykazały, że wirnik można wyrównoważyć dynamicznie, umieszczając w dowolnie obranych płaszczyznach korekcyjnych n1t n2 dwie masy korekcyjne mk1, mk2 o momentach statycznych względem osi obrotu Oz równych S?, S2, pod kątami ęk1, (pk2. Istnieje oczywiście możliwość swobodnego doboru mas korekcyjnych i promieni ich zamocowania w takim zakresie, aby był spełniony warunek: S(- = mkirki dla / = 1; 2.
Przykład 3.21
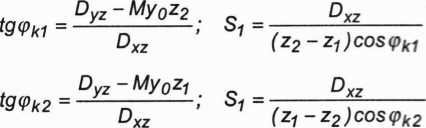
Dany jest wał o masie M i środku ciężkości S leżącym na osi obrotu Oz wirujący wokół tej osi z prędkością kątową w (rys. 3.82), dla którego D xz ~ 0 ■ Dyz ~ 0-
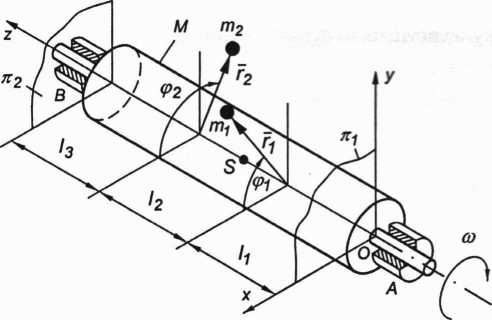
Rys. 3.82. Wyrównoważanie wału z układem mas skupionych
Niewyrównoważenie wału spowodowane jest układem dwóch mas m-j =10 g i m2 = 20 g umieszczonych odpowiednio na promieniach r■, = 50 mm, r2 = 40 mm, pod kątami = 60°, q>2 = 120°, mierzonymi w układzie ruchomym Oxyz związanym z wałem. Dane są odległości: I-, =l2 = l3 = I = 200 mm. Położenie płaszczyzn korekcyjnych ji1t n2 jak na rysunku.
209
Wyszukiwarka
Podobne podstrony:
24 luty 07 (44) Równania równowagi sil bez uwzględnienia tarcia (P3.118) P2 + R02 + R02 + R12 ~
23 luty 07 (143) Równanie (P3.14) zawiera teraz tylko dwie niewiadome oraz R12 oraz RS:3. (P3.16) R^
24 luty 07 (67) stąd (P3.134) Si(2 = mk2rk2 - m2s2 + 1713^2 ~ O gdzie sk2 - moment statyczny przeciw
24 luty 07 (109) Etap 6 Całkowanie dynamicznego równania ruchu a-j -bu>i = J2 dco1 ~df (P3.219) (
24 luty 07 (132) Dobór koła zamachowego na podstawie równania różnicowego (P3.264) Rozważaną metodę
24 luty 07 (141) Rozwiązując równanie (P3.287) dla zadanych warunków początkowych, mamy: -
24 luty 07 (61) Z czwartego równania (P3.128) mamy mk2 -m1r1sin(p1-2m2r2sin(p2 =1583g 3rk2 sinęk2 (P
23 luty 07 (139) Równanie wektorowe równowagi sił działających na człon napędzający ma postać (P3.9)
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
24 luty 07 (108) Uwaga. Ponieważ całkowite przełożenie może być dodatnie lub ujemne w równaniu na Mz
24 luty 07 (10) W etapie pierwszym rozkładamy znaną siłę P2 na siły Rq2 oraz CNM zgodnie z równaniem
24 luty 07 (110) Obliczenie przyśpieszenia kątowego wału silnika (es(t) = e-i(t)) £t = ~~e T Jzrs (P
24 luty 07 (116) 3.7.6. Rozwiązanie dynamicznego równania ruchu maszyny metodą równań różnicowych Pr
24 luty 07 (122) Napiszemy teraz równanie ruchu maszyny w postaci energetycznej dla części cyklu zaw
24 luty 07 (126) Dodatkowo, jeśli jest mały, to pomijając go w obliczeniach, uzysk
24 luty 07 (130) stądJkp ~ J* a> zr CO r 4k zr,i (P3.274) Ponieważ wał pośredni obraca się zwykle
24 luty 07 (131) Analiza wzoru (P3.275) wykazuje, że na wartość momentu bezwładności koła zamachoweg
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (18) Ri RktT oznaczają w przypadku występowania tarcia ruchowego reakcje całkowite, jakim
więcej podobnych podstron