24 luty 07 (18)
Ri RktT oznaczają w przypadku występowania tarcia ruchowego reakcje całkowite, jakimi ciało k działa na ciało / odpowiednio w punktach A i B. Reakcje te odchylają się od normalnej do prowadnicy o kąt pr w ten sposób, że siły tarcia Tfi i Tu mają zwroty przeciwne do prędkości v/k, czyli prędkości suwaka / względem prowadnicy k.
Przykład 3.11
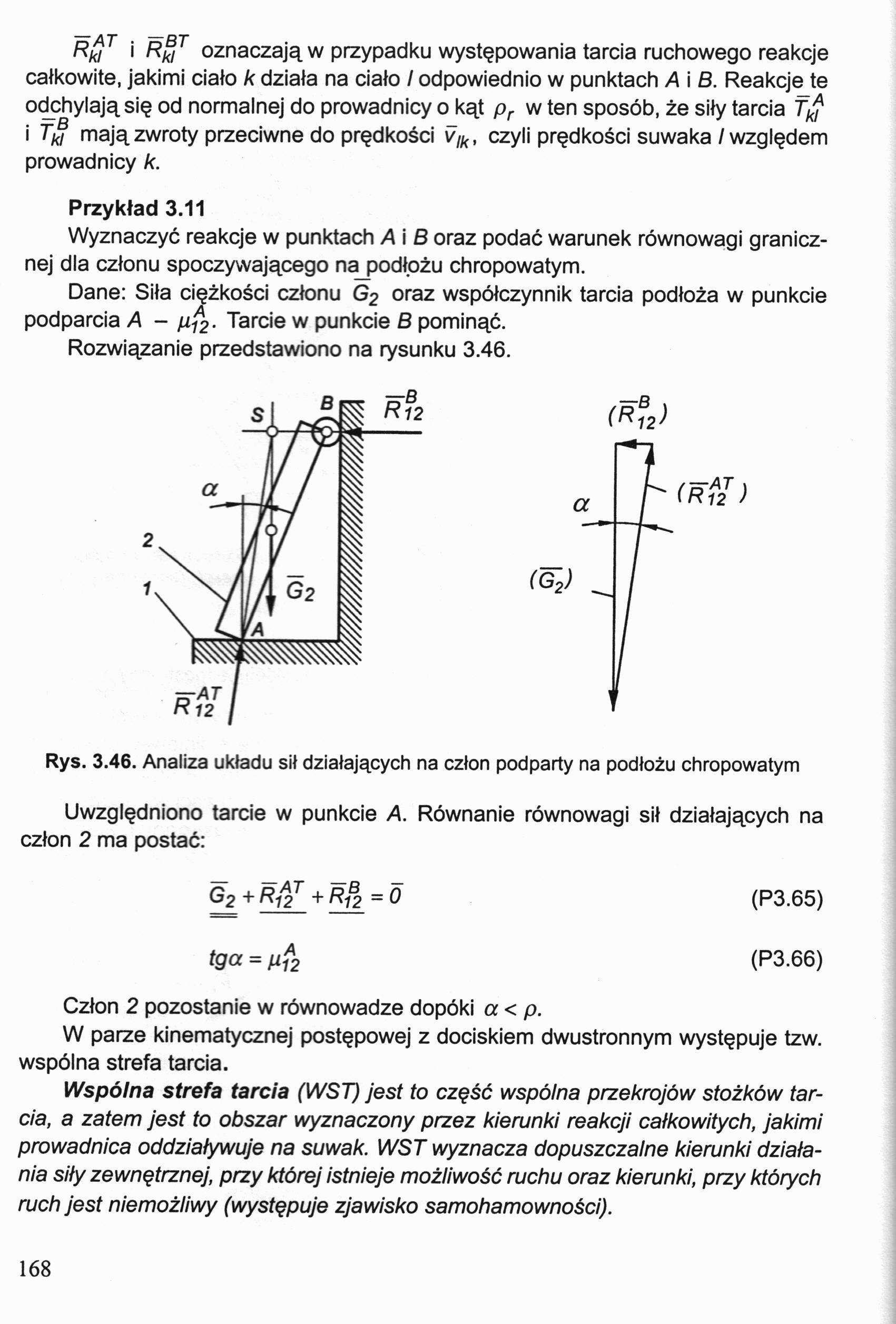
Wyznaczyć reakcje w punktach A i B oraz podać warunek równowagi granicznej dla członu spoczywającego na_podłożu chropowatym.
Dane: Siła ciężkości członu G2 oraz współczynnik tarcia podłoża w punkcie podparcia A - pf2- Tarcie w punkcie B pominąć.
Rozwiązanie przedstawiono na rysunku 3.46.
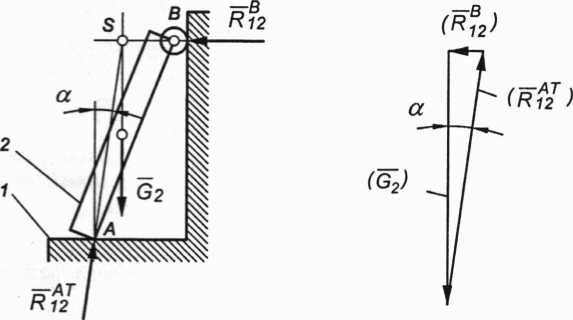
Rys. 3.46. Analiza układu sił działających na człon podparty na podłożu chropowatym
Uwzględniono tarcie w punkcie A. Równanie równowagi sił działających na człon 2 ma postać:
(P3.65)

(P3.66)
Człon 2 pozostanie w równowadze dopóki a< p.
W parze kinematycznej postępowej z dociskiem dwustronnym występuje tzw. wspólna strefa tarcia.
Wspólna strefa tarcia (WST) jest to część wspólna przekrojów stożków tarcia, a zatem jest to obszar wyznaczony przez kierunki reakcji całkowitych, jakimi prowadnica oddziaływuje na suwak. WST wyznacza dopuszczalne kierunki działania siły zewnętrznej, przy której istnieje możliwość ruchu oraz kierunki, przy których ruch jest niemożliwy (występuje zjawisko samohamowności).
168
Wyszukiwarka
Podobne podstrony:
24 luty 07 (83) Po wprowadzeniu oznaczeń równanie (3.98) dla członu redukcji wykonującego ruch postę
24 luty 07 (14) 3.4. ANALIZA SIŁ W PARACH KINEMATYCZNYCH Z UWZGLĘDNIENIEM TARCIA Podczas ślizgowego
24 luty 07 (44) Równania równowagi sil bez uwzględnienia tarcia (P3.118) P2 + R02 + R02 + R12 ~
24 luty 07 (95) Uwaga. Równania (3.118) lub (3.119) nazywamy równaniami ruchu członu redukcji w post
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
24 luty 07 (145) Ad c) W przypadku zmian obciążenia silnika w bardzo szerokich granicach należy doda
24 luty 07 (146) Rozwiązujemy równanie różniczkowe przyjmując, że koniec rozruchu oznacza osiągnięci
24 luty 07 (154) charakterystyk kinematycznych w AKM przyjmują oznaczenia cyfrowo-literowe, cyfry ok
24 luty 07 (41) Sprawność mechanizmu wynosi ri = ^=/3"C =1, gdyż
24 luty 07 (64) 3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych W wielu przypadkac
24 luty 07 (80) Występujące we wzorach (3.96) i (3.97) wyrażenia O2 (0: f 2 (Oi zr zr(O, oraz co,
24 luty 07 (84) Natomiast, jeśli otrzymamy Pzr(0 lub Mzr(0, to oznacza, że siła zredukowana jest sił
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (101) Drugą część zlinearyzowanej charakterystyki przedstawia odcinek BS prostej przechod
24 luty 07 (102) Etap 2 Rozruch układu bez obciążenia, Mb = 0, przy malejącym liniowo momencie napęd
24 luty 07 (103) Po czasie t2 = 3T prędkość kątowa osiąga 95% wartości ustalonej coust w drugim etap
więcej podobnych podstron