24 luty 07 (64)
3.6.4. Wyrównoważanie statyczne płaskich mechanizmów dźwigniowych
W wielu przypadkach ograniczamy się do wyrównoważenia statycznego mechanizmów przestrzennych, czyli do tzw. wyrównoważenia częściowego, co znajduje techniczne uzasadnienie.
Sytuacja znacznie się upraszcza, gdy mechanizm dźwigniowy pracuje w jednej płaszczyźnie. Możliwe są wtedy dwa przypadki:
1) płaszczyzna ruchu mechanizmu jest jego płaszczyzną symetrii - wtedy warunki (3.83) oraz (3.84) są spełnione i mechanizm wyrównoważony statycznie jest jednocześnie wyrównoważony dynamicznie;
2) płaszczyzna ruchu mechanizmu nie jest jego płaszczyzną symetrii (jest to najczęstszy przypadek); jeśli współrzędne z,- są małe, to warunki (3.83) oraz (3.84) są w przybliżeniu spełnione i wystarczy mechanizm wyrównoważyć statycznie; jeżeli natomiast współrzędne z,- są duże i nie można ich pominąć, wtedy należy wyrównoważyć mechanizm dynamicznie.
W dalszej części analizy ograniczamy się do problematyki związanej z wyrów-noważaniem statycznym mechanizmów.

x
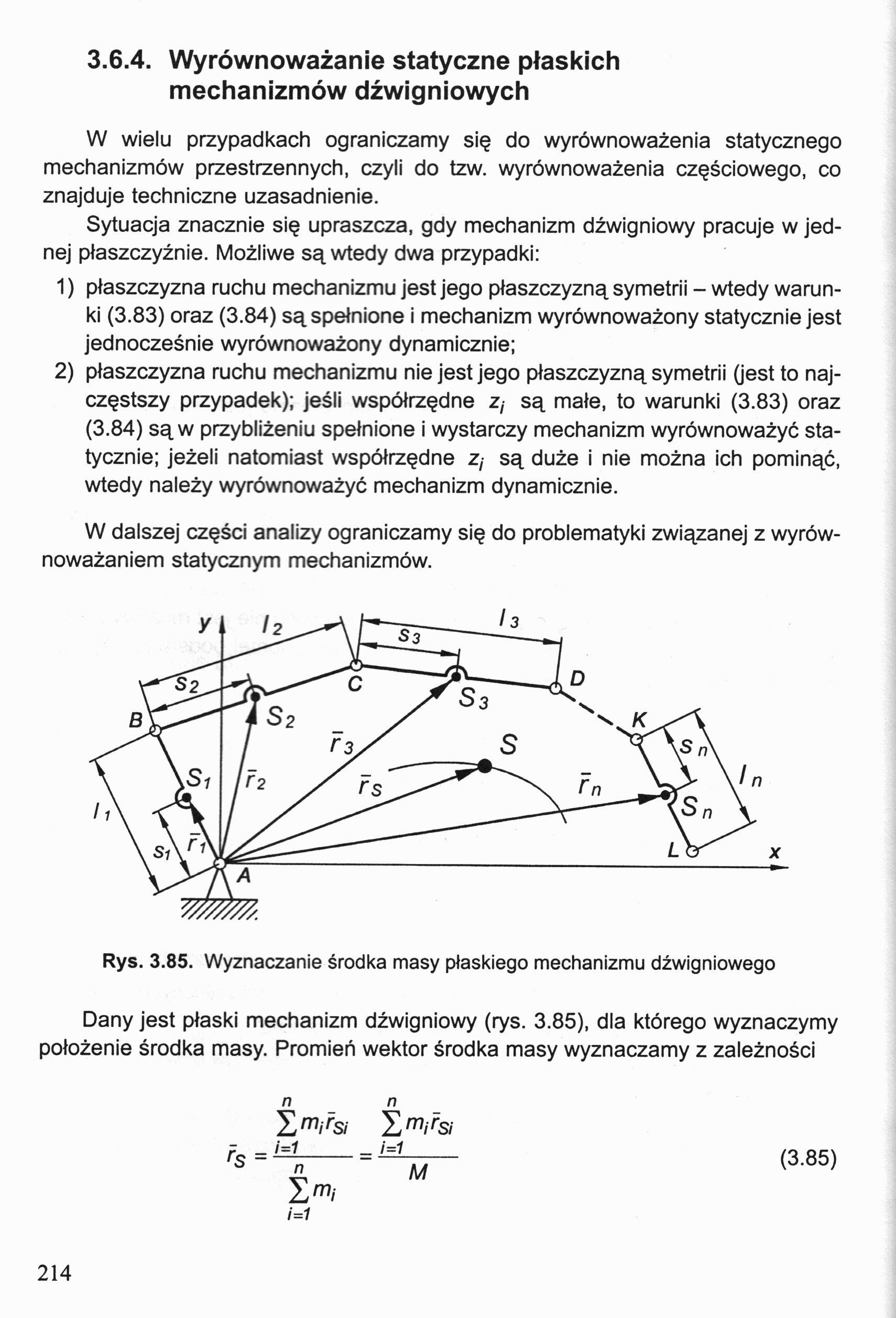
Rys. 3.85. Wyznaczanie środka masy płaskiego mechanizmu dźwigniowego
Dany jest płaski mechanizm dźwigniowy (rys. 3.85), dla którego wyznaczymy położenie środka masy. Promień wektor środka masy wyznaczamy z zależności
n
n
(3.85)
214
Wyszukiwarka
Podobne podstrony:
24 luty 07 (147) 4. KOMPUTEROWE MODELOWANIE I ANALIZA MECHANIZMÓW Rozwiązywanie zagadnień analizy me
24 luty 07 (149) Podstawowymi składnikami budowy mechanizmów prostych i złożonych są grupy struktura
24 luty 07 (159) Literatura [1] Artobolewskij I.I.: Tieorija mechanizmov i maszin.
24 luty 07 (34) Moc sił tarcia w mechanizmach zależy od wielu parametrów konstrukcyjnych, kinematycz
24 luty 07 (36) Całkowitą moc traconą w mechanizmie wyznaczamy, sumując moce tracone w jego wszystki
24 luty 07 (5) Przykład 3.8 Analiza statyczna metodą Culmana grupy strukturalnej suwak-dźwignia Grup
24 luty 07 (65) W trakcie ruchu niewyrównoważonego mechanizmu środek masy porusza się po torze o wsp
24 luty 07 (9) Rys. 3.41. Analiza siłowa mechanizmu krzywkowego: a) mechanizm krzywkowy z popycha-cz
23 luty 07 (146) mi,Jsi B 2 Rozwiązanie Mechanizm, podobnie jak poprzednie, składa się z członu napę
24 luty 07 (79) Energia kinetyczna /-tego członu wykonującego ruch postępowy wyraża się wzorem 7
24 luty 07 (30) Etapy 2 i 3. Analiza statyczna (rys. 3.59) Etap 2. Analiza sił działających na człon
24 luty 07 (31) 3.4.5. Tarcie toczne w parach kinematycznych klasy 4 mechanizmów płaskichPrzypadek 1
24 luty 07 (40) Rozwiązanie W pierwszym etapie rozwiązania przeprowadzamy analizę statyczną mechaniz
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
24 luty 07 (77) Na rysunku 3.94 przedstawiono łańcuch kinematyczny dowolnego złożonego mechanizmu pł
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
więcej podobnych podstron